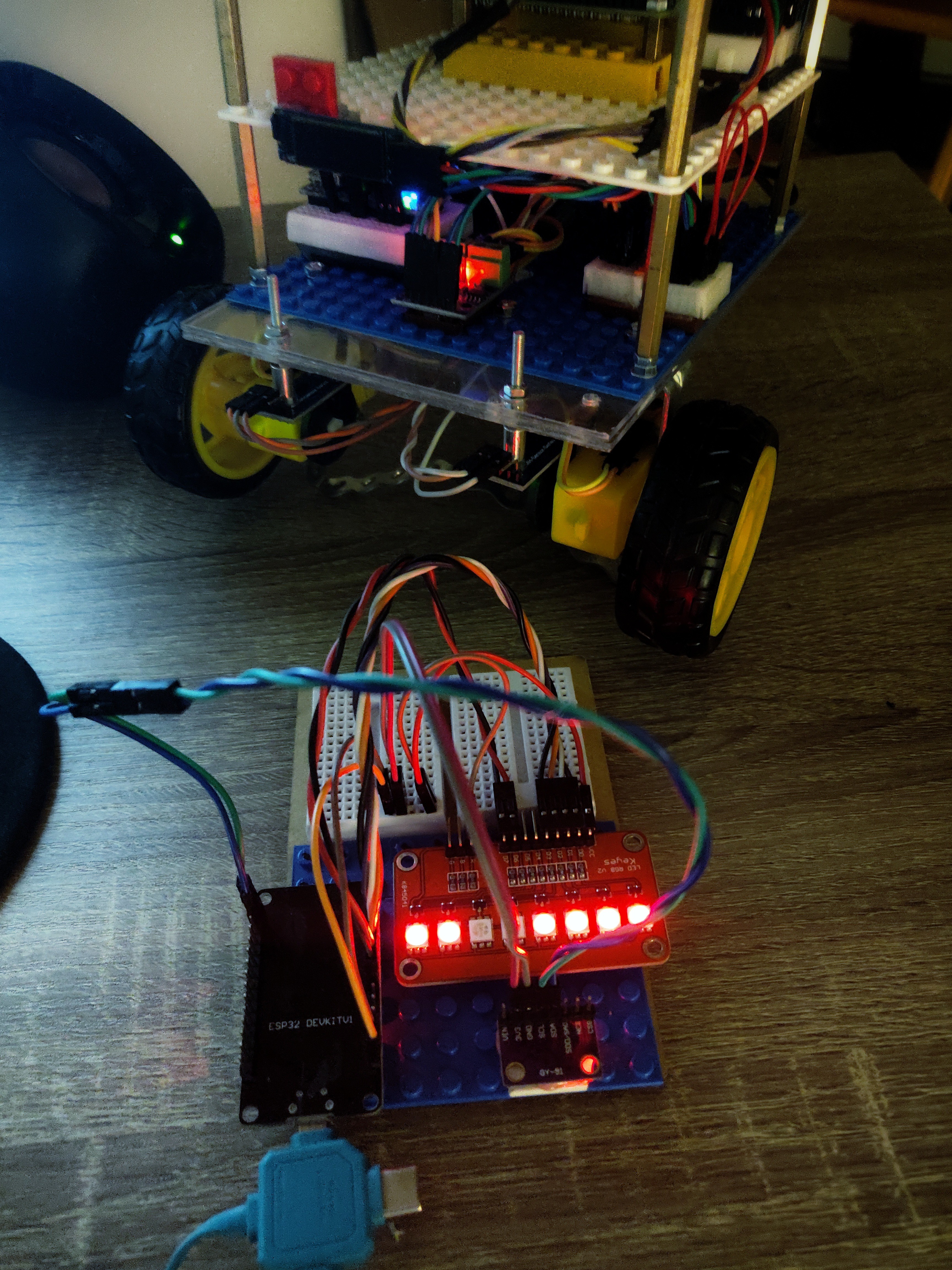
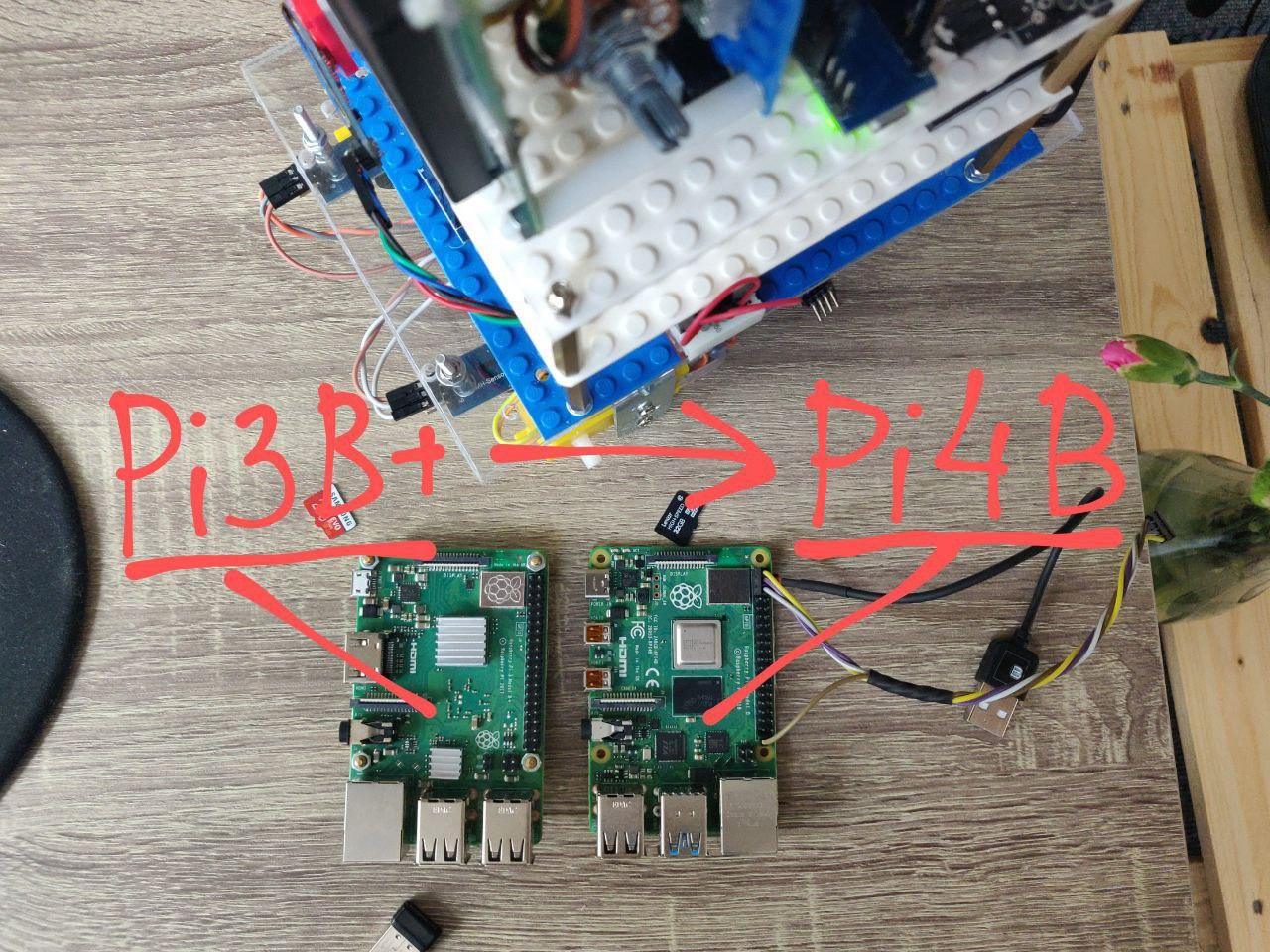
New ESP32-based platform testing
Works:
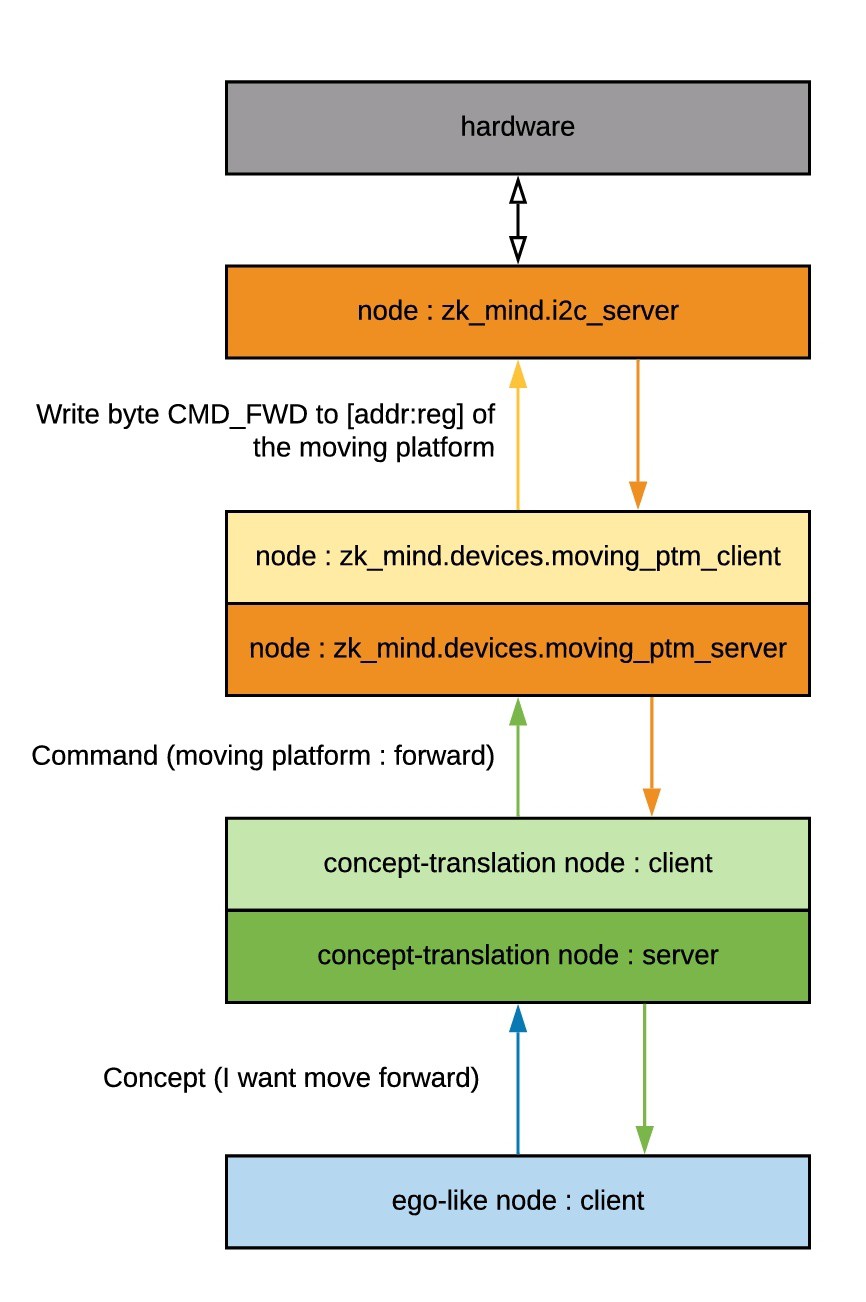
- GY-91 through I2C: gyroscope + accelerometer
- Serial for external control
- I2C slave for external control
- Motors control
Works:
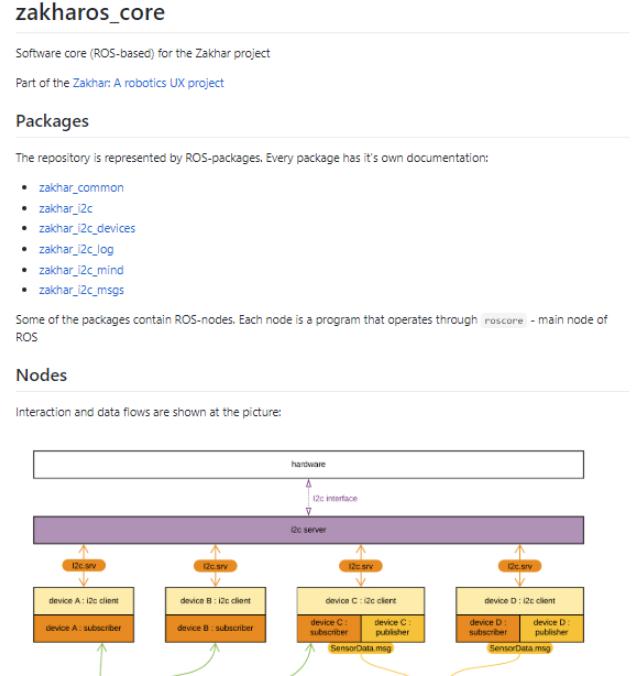
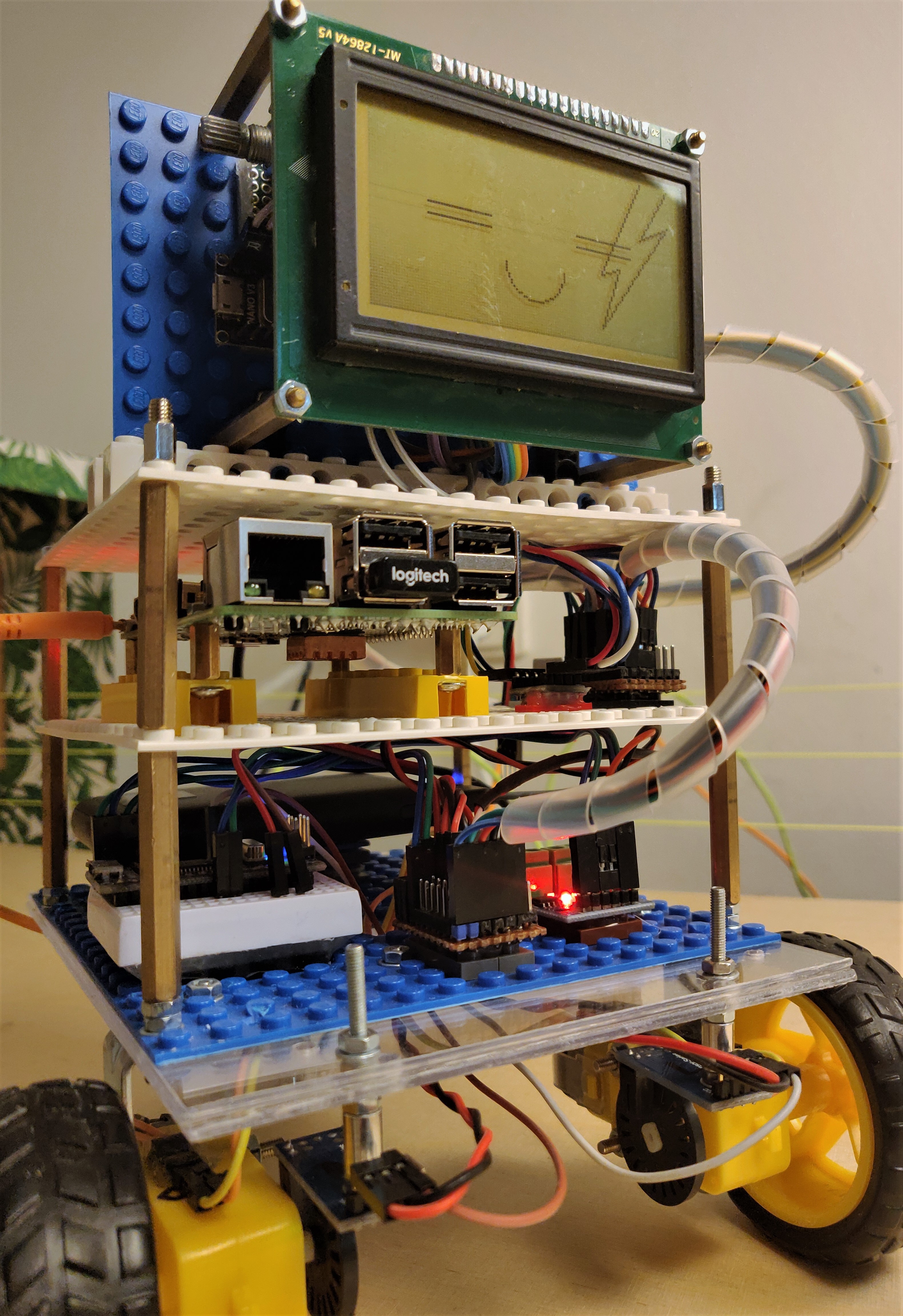
While the robot is changing all the time, after the last update I’ve decided to take some snapshot of its current state and show to the public what’s going on now. Let’s start:
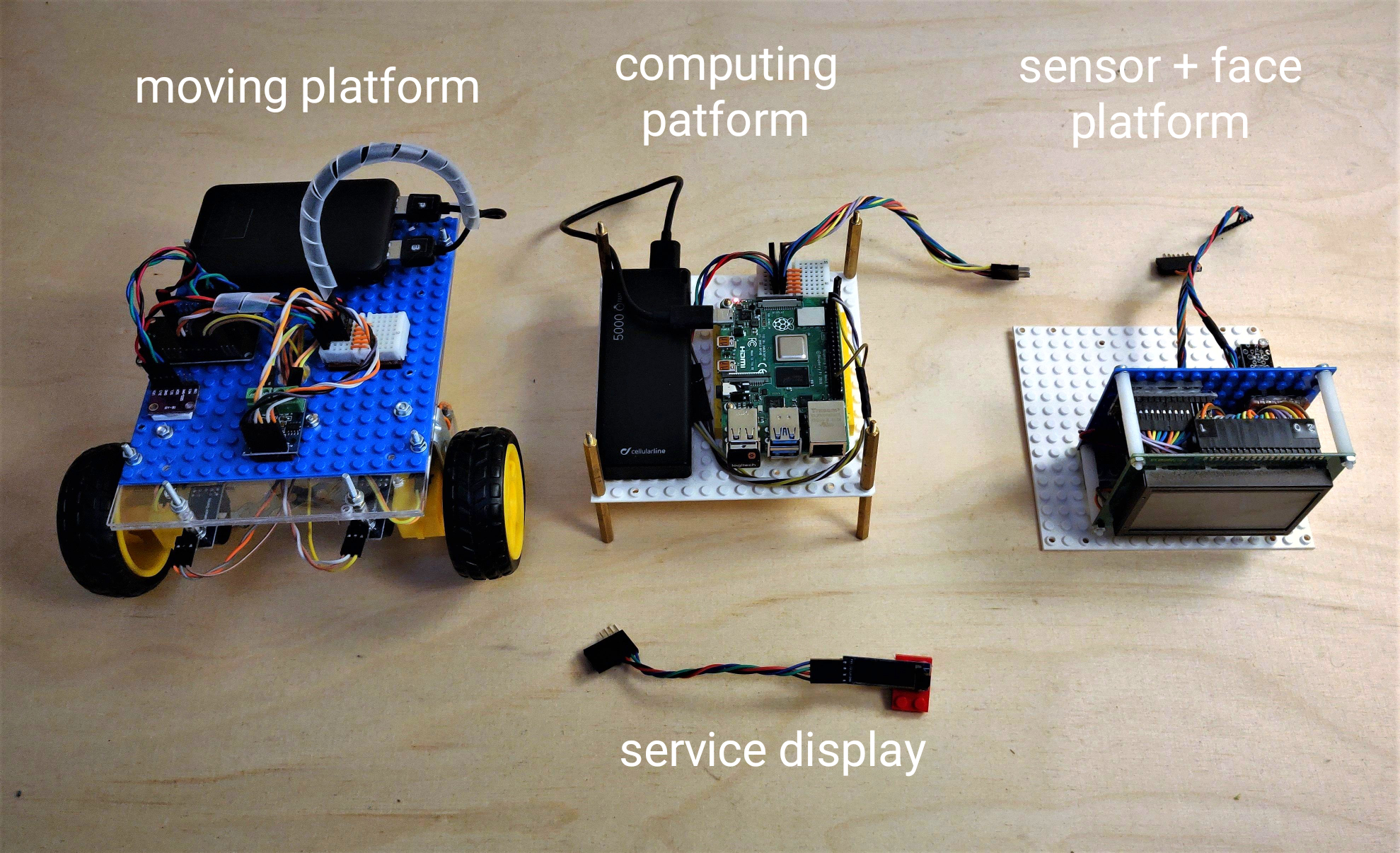
 Zakhar consists of three (sometimes four) platforms and a service OLED display. I’m using the last one for debugging, testing, etc.
Zakhar consists of three (sometimes four) platforms and a service OLED display. I’m using the last one for debugging, testing, etc.
When three wheels are better than four