Draft of the updated ROS-node network with the Emotional Core
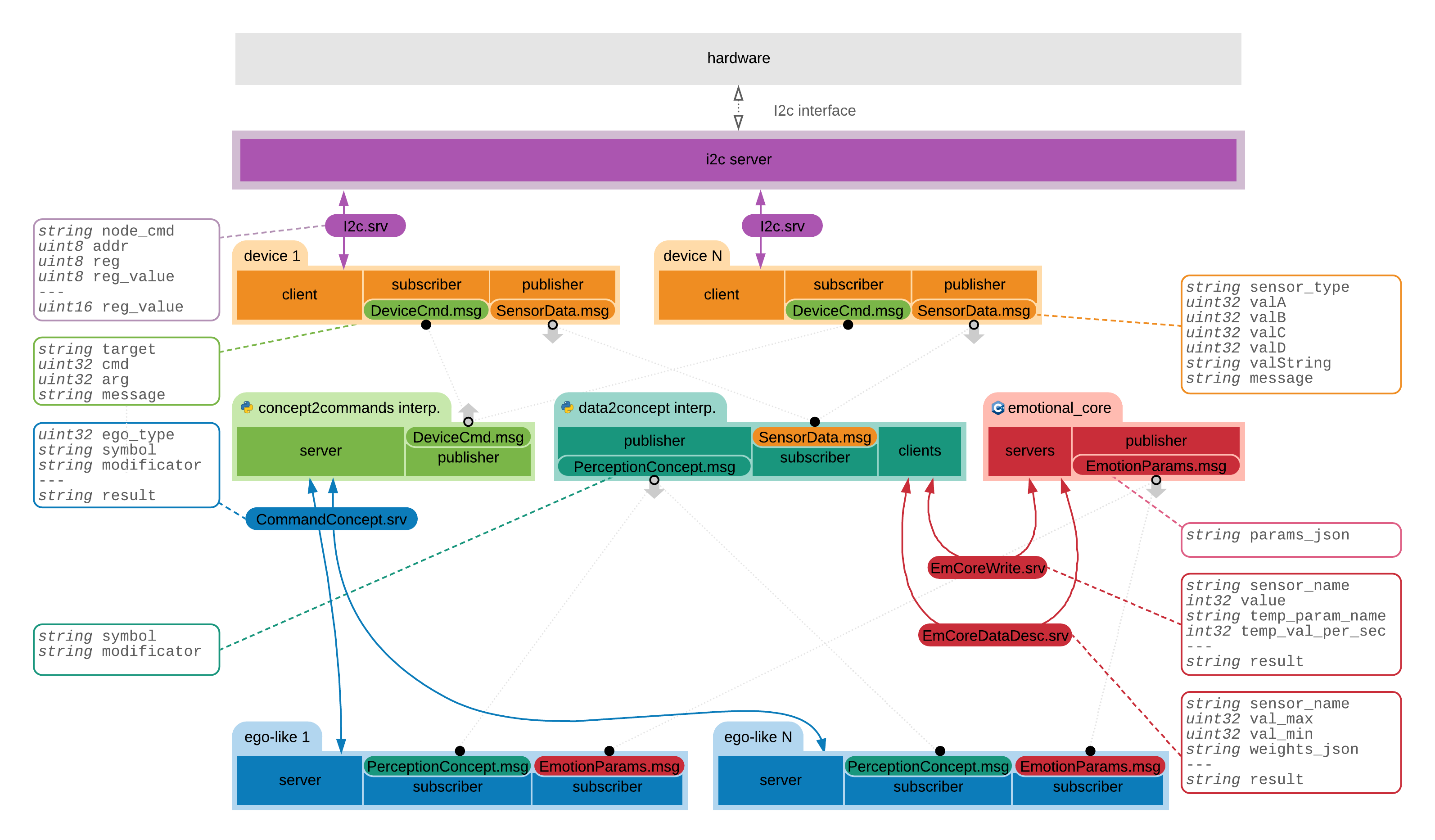
Complexity of the networks is getting increased in a non-linear manner with any new type of node added, so documentation of the development is becoming more crucial than ever. So, I’ve decided to, firstly redraw the network diagram to make it easier to read and contain more useful information. Then I’ve spent some time on how the Emotional Core should interact with other nodes.
Initially, I thought that naming each condition based on a set of emotional parameters is a clever idea.
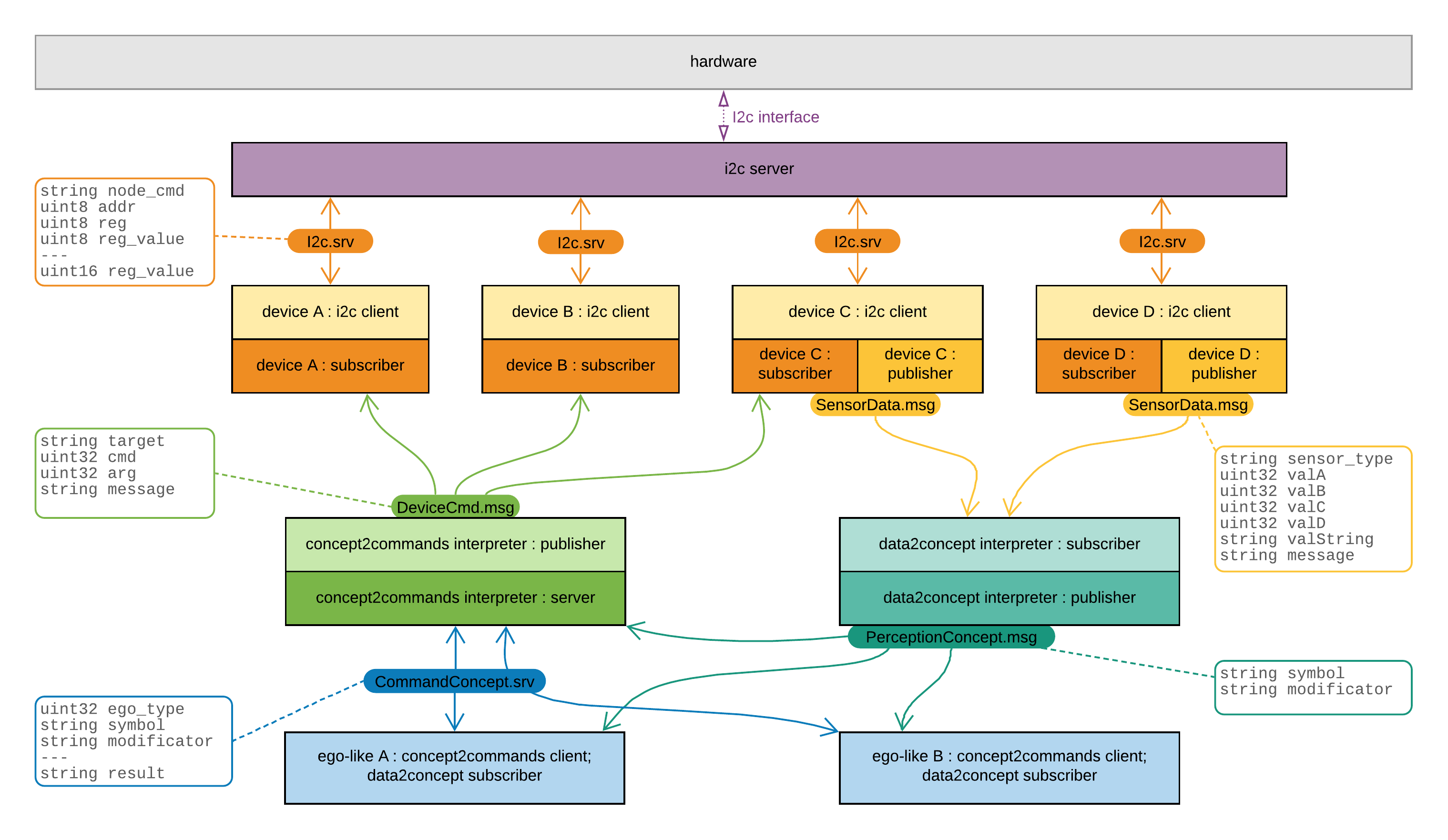


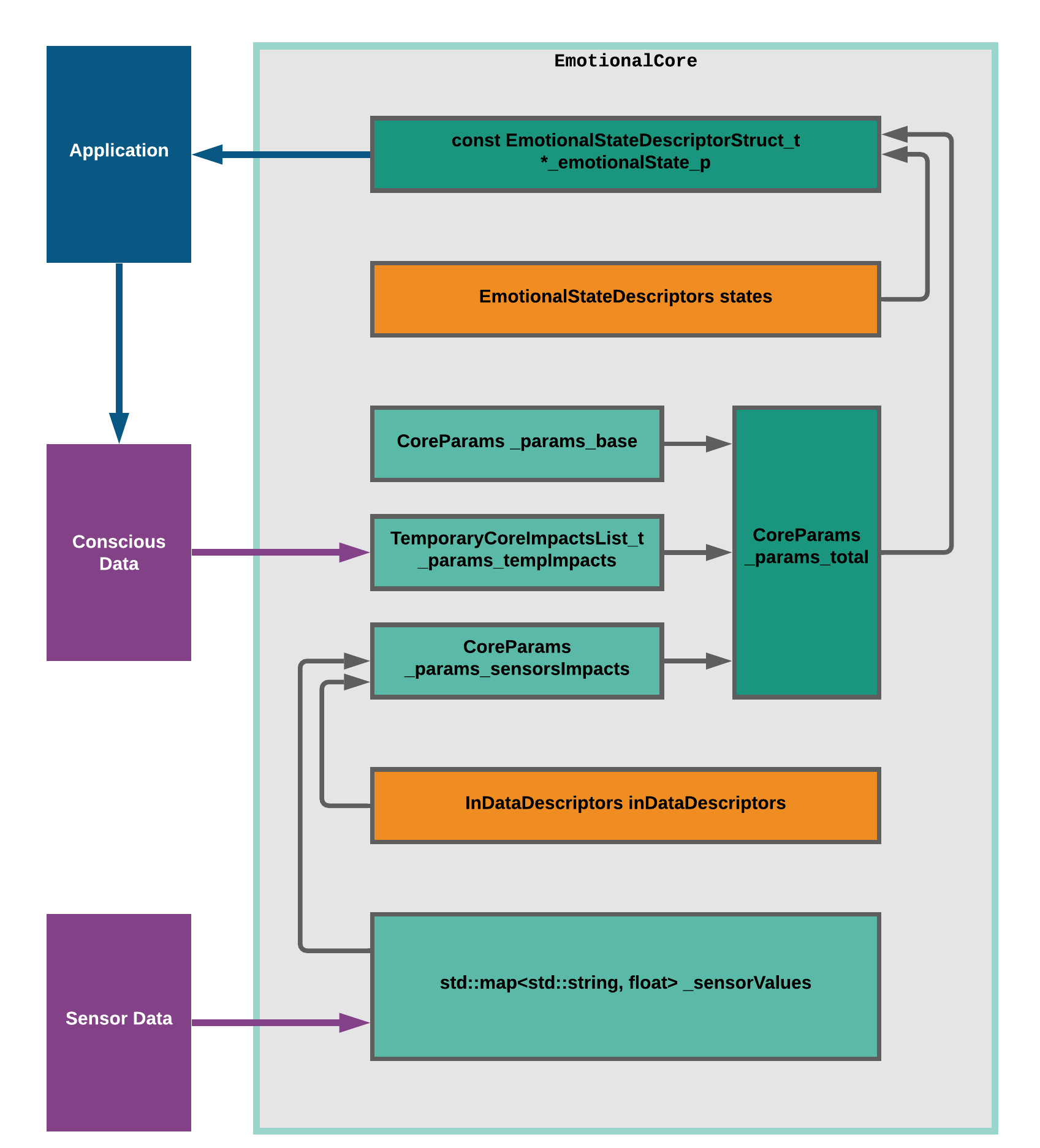
 Or more detailed:
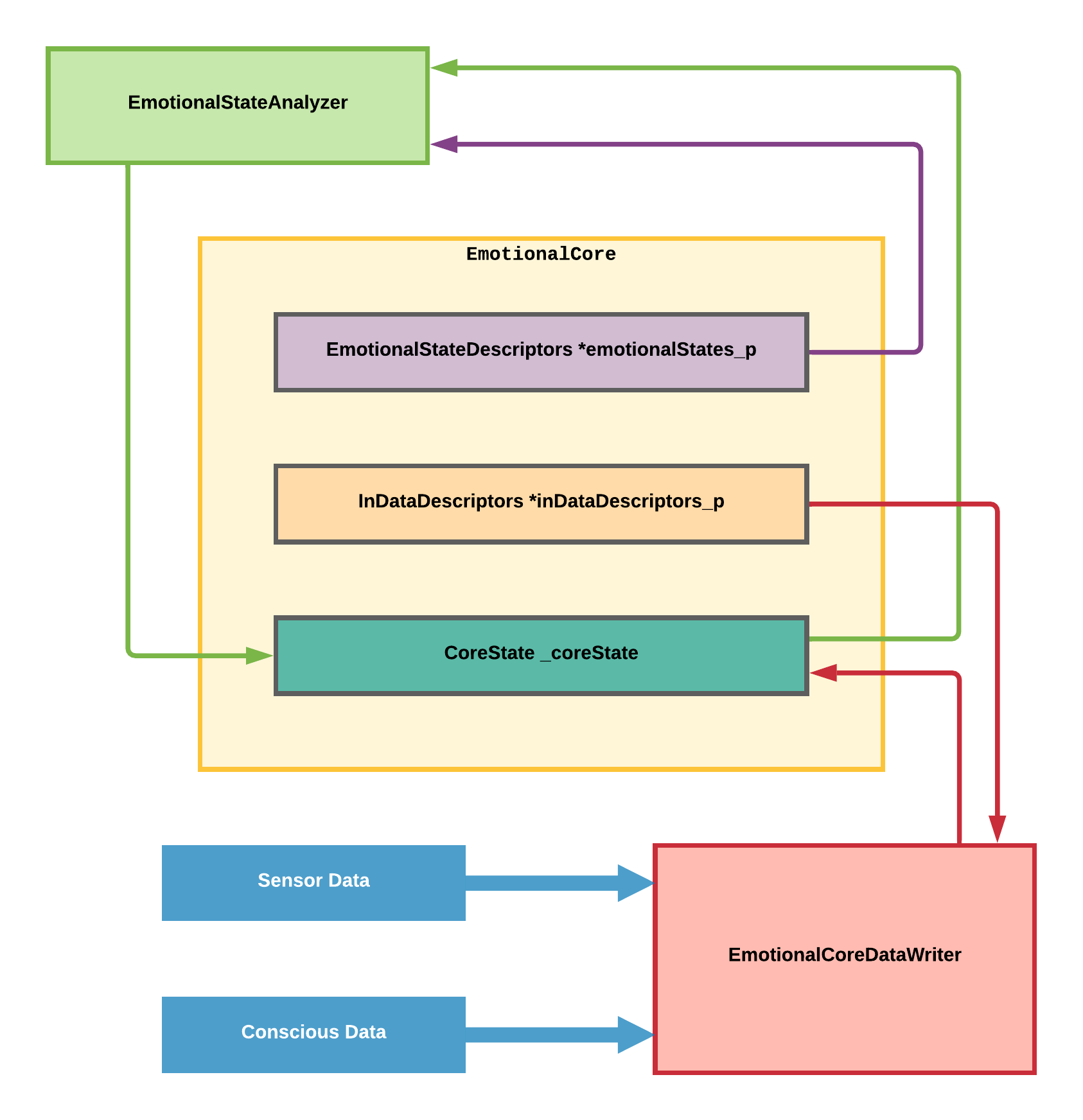
Or more detailed: