The Wheeled Platform with CAN support is merged!
A new step in Zakhar global transition to CAN bus is done!
A new step in Zakhar global transition to CAN bus is done!
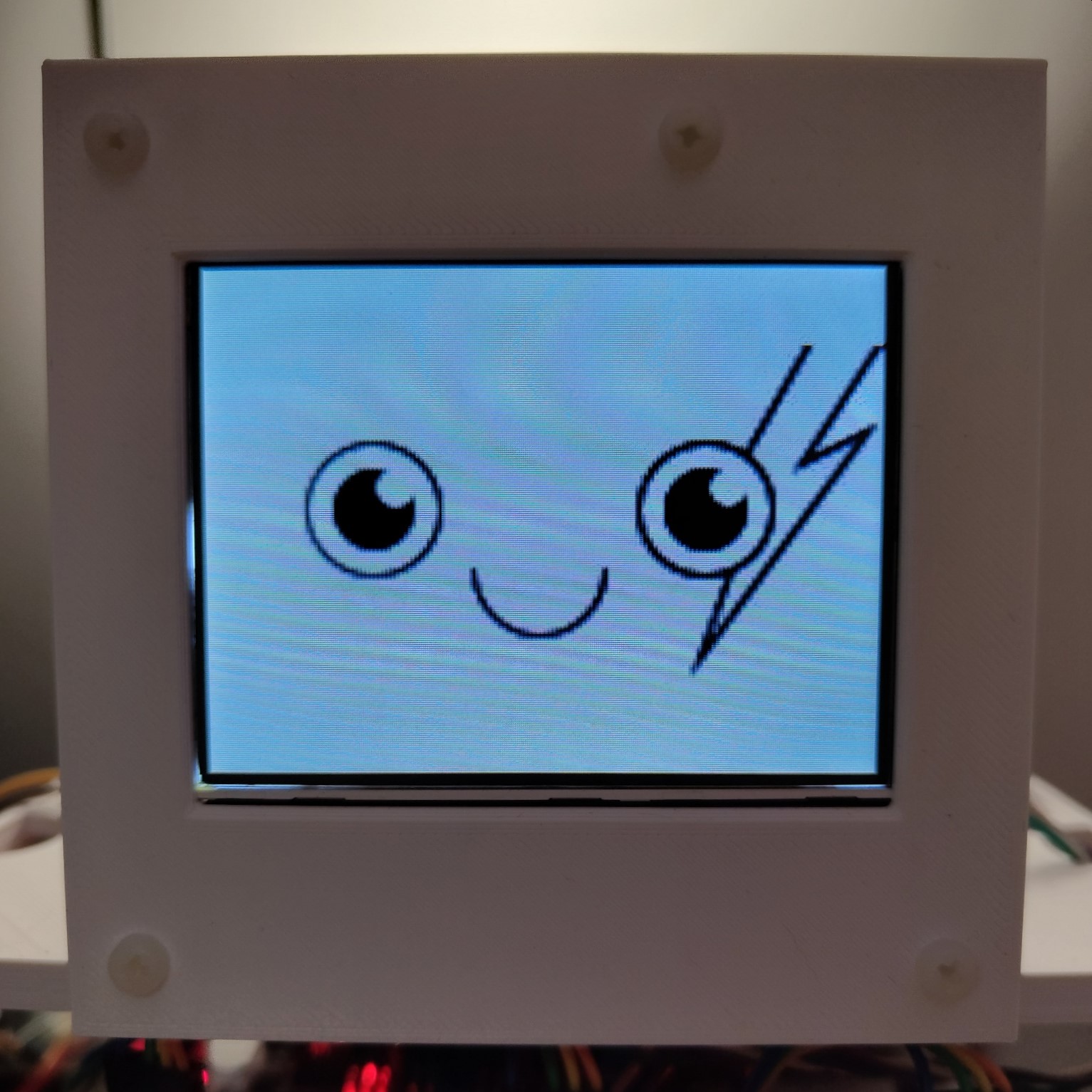

The new Unit is based on the ESP-Wrover-Kit and uses a TJA1050 module for CANbus communication.
It is compatible with the qCAN protocol (described on the Zakhar main page) and can show 5 facial expressions: Anger (0x32), Sadness (0x34), Pleasure (0x33), a Blink (0x31), and Calm (0x30).
It’s been more than two years already since I started working on my robot Zakhar. The Zakhar 1 was built out of Lego and relied on I2C communication between modules. It was a nightmare because as it turned out each MCU developer has its own understanding of how a developer should interact with the I2C unit. What I wanted from the interface: