Sensor Platform with STM32
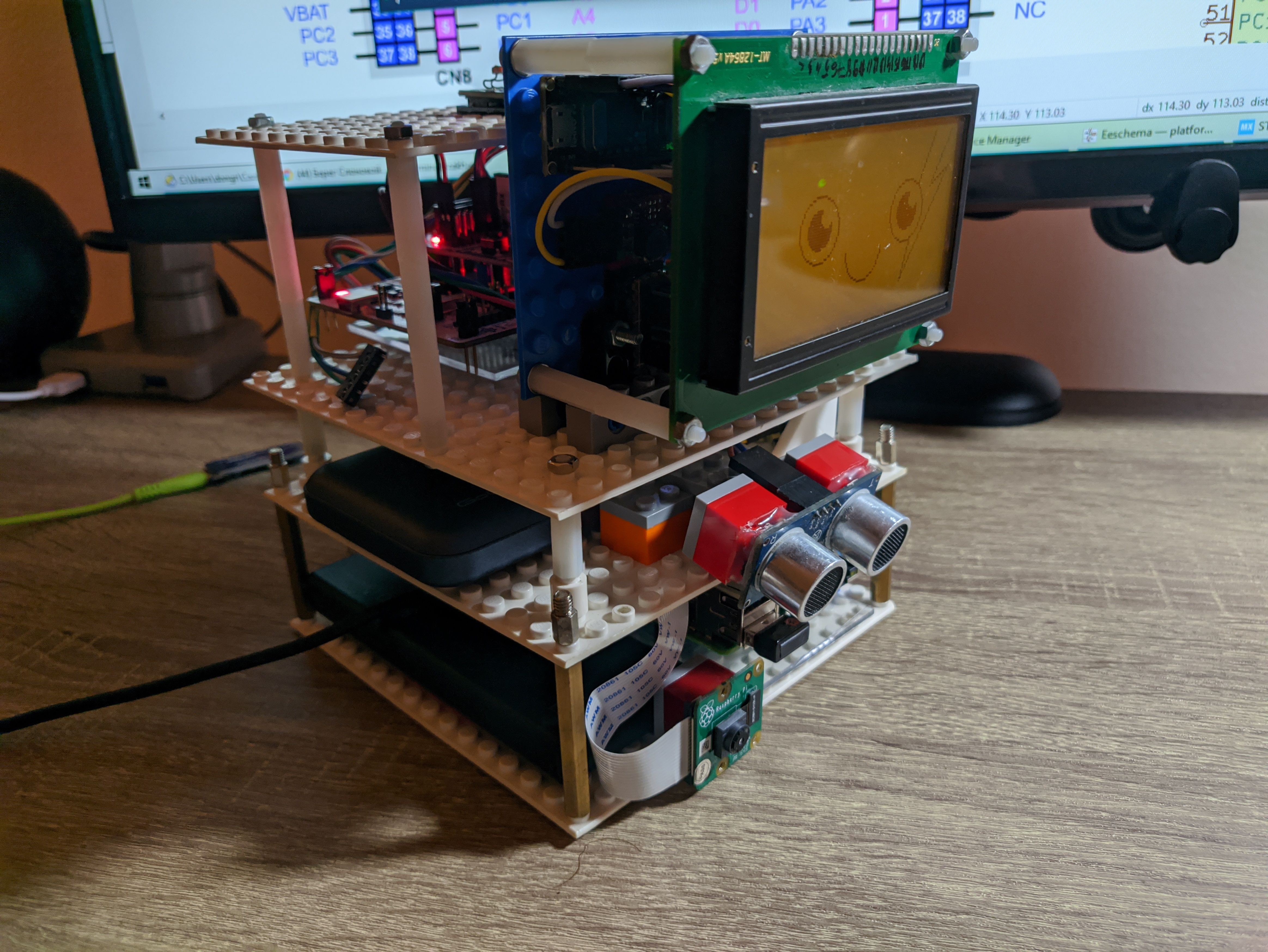
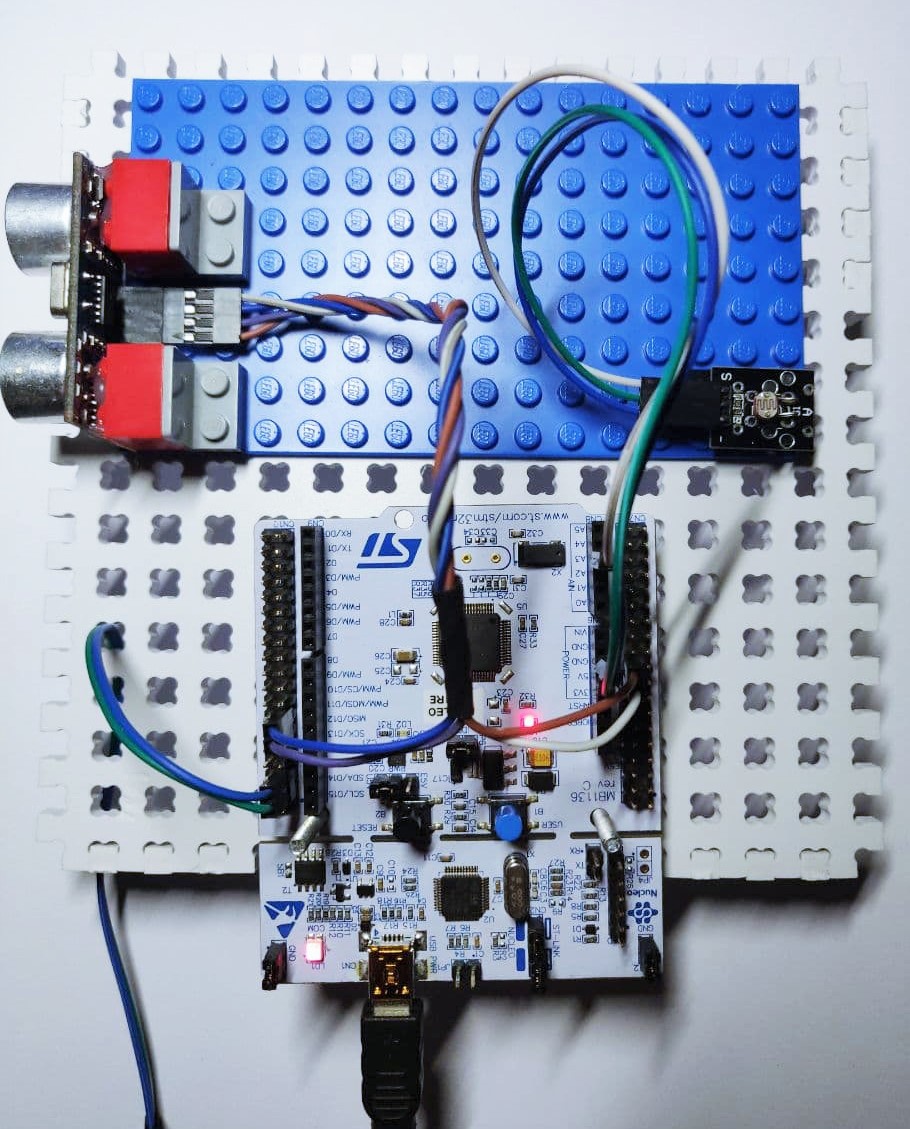
Done! Now sensors data is collecting by a powerful STM32 MCU with FreeRTOS. This will help adding even more sensors. For now, there are two:
Ultrasonic Distance Sensor - HC-SR04 KY-018 Photoresistor Module Here is a video of the update in action:
Links:
Updated source code with STM32 support Repository of my SharedVirtualRegisters library that I used in the update - it is thread-safe and supports FreeRTOS, but can work without any OS as well Repository of the logging library - it is a fork of the log.
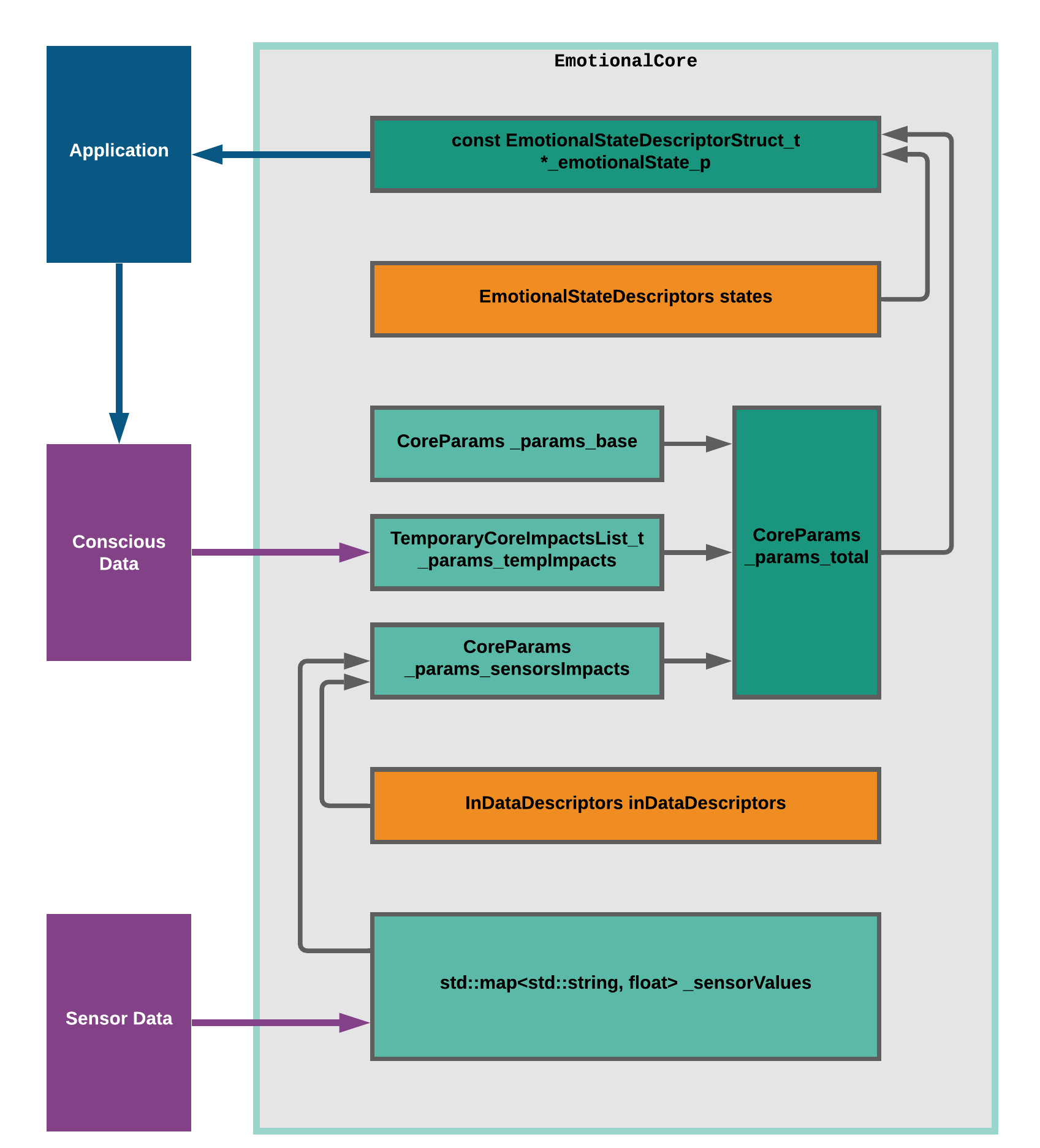
 Or more detailed:
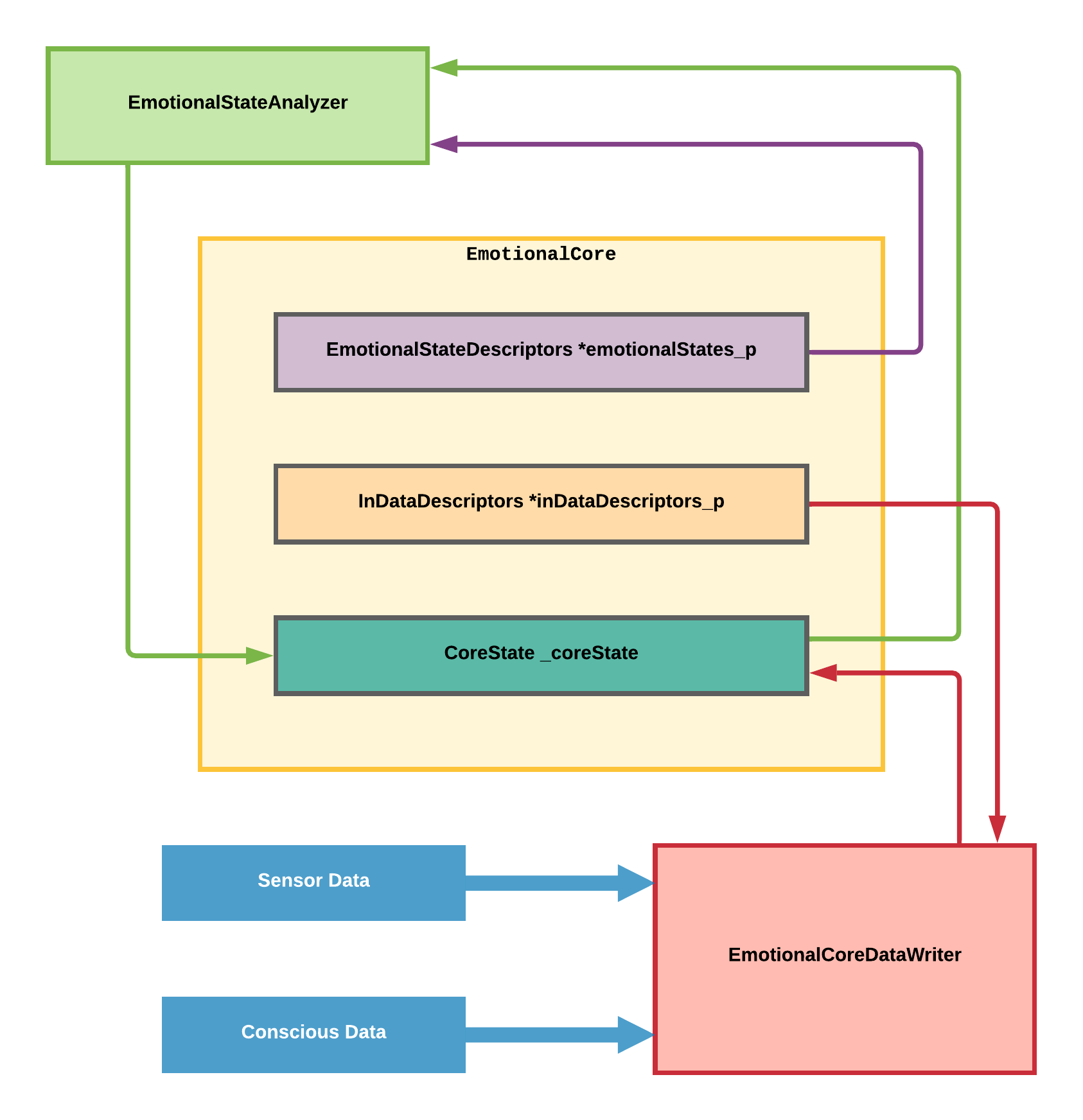
Or more detailed: