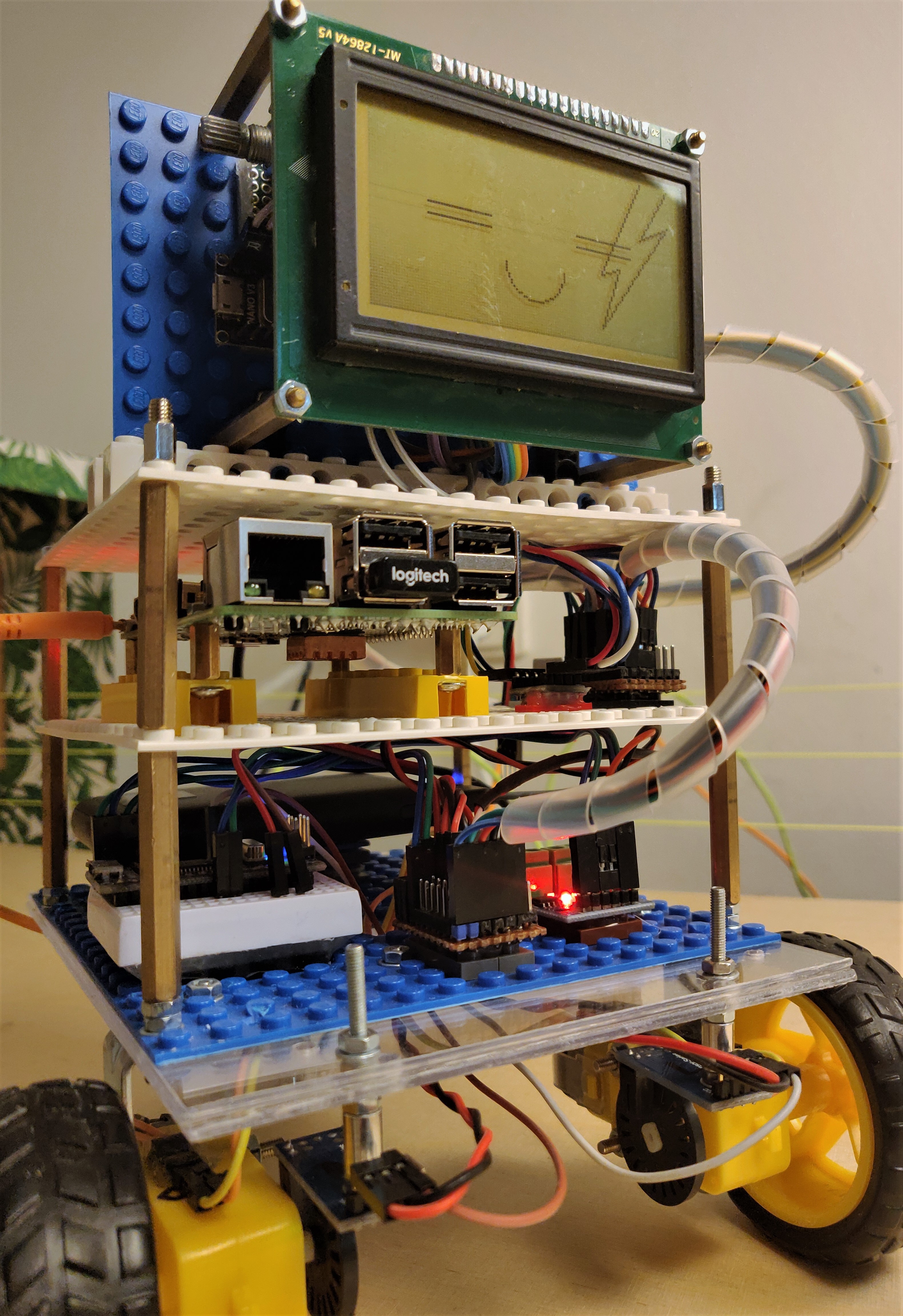
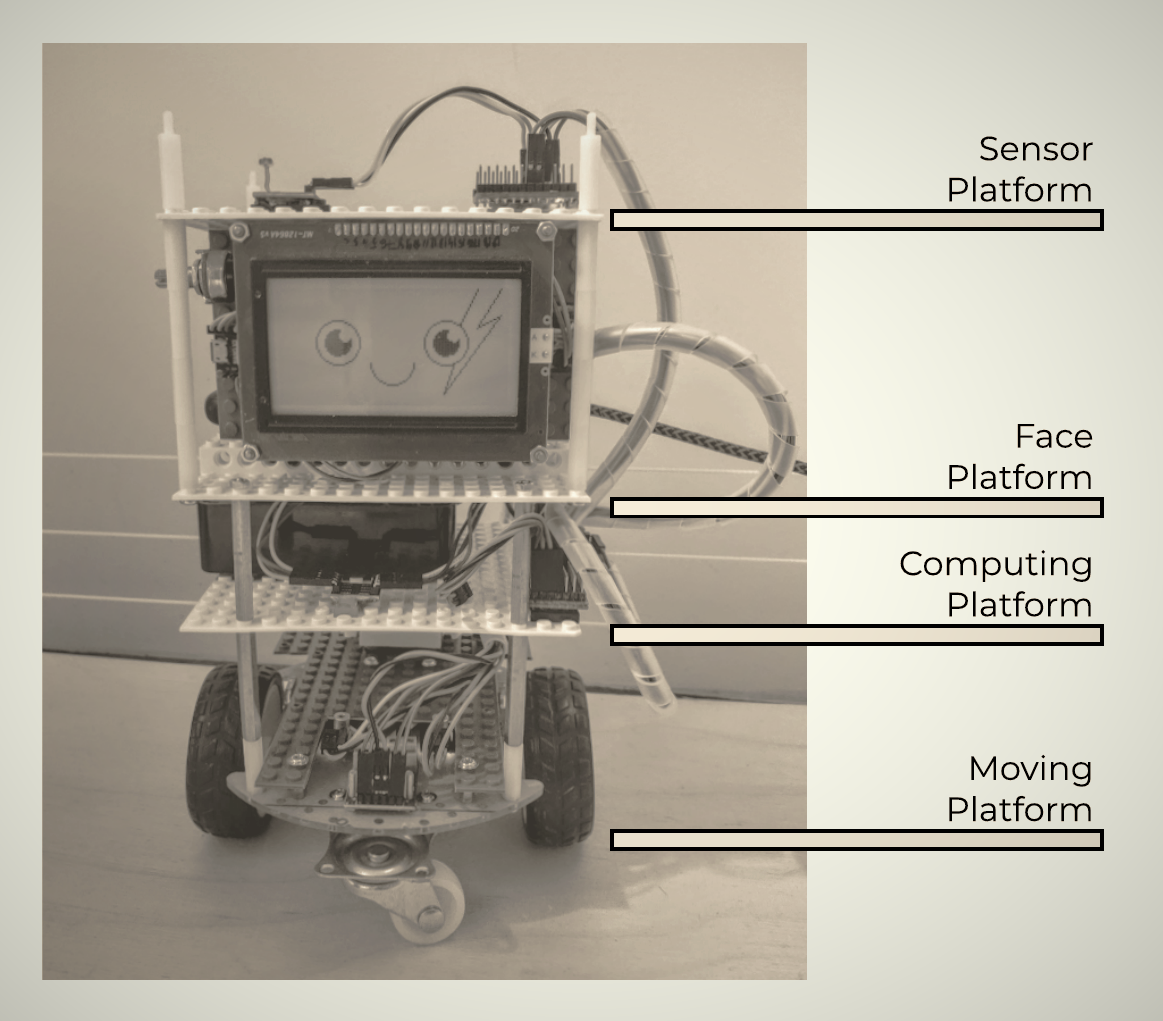
Just a photo with current state and a repo I'm working on.
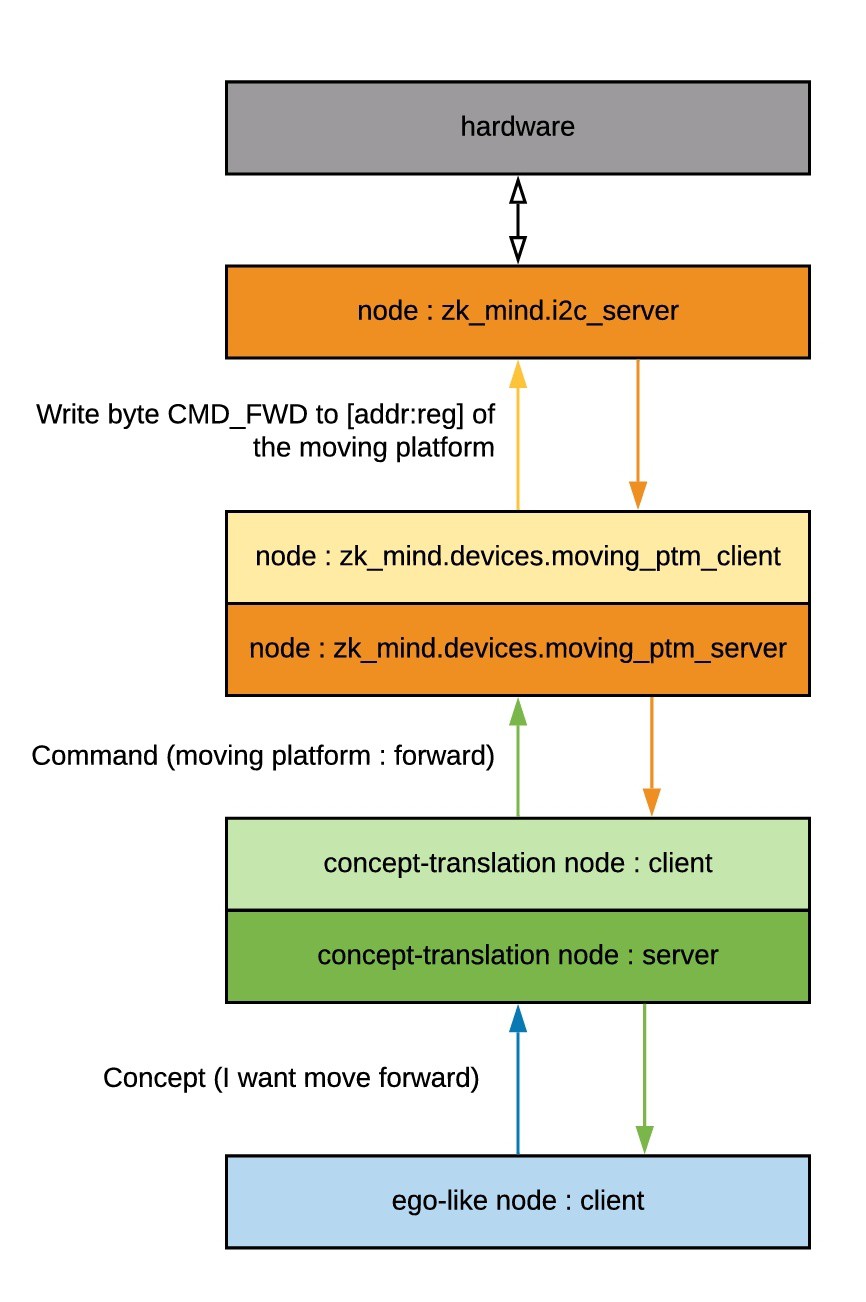
https://github.com/an-dr/zakharos_core (just pushed one more step according the plan)
When three wheels are better than four
While I’m finishing a new article about the project, please look the video demonstration. Without the context for now