Calm prototyping evening
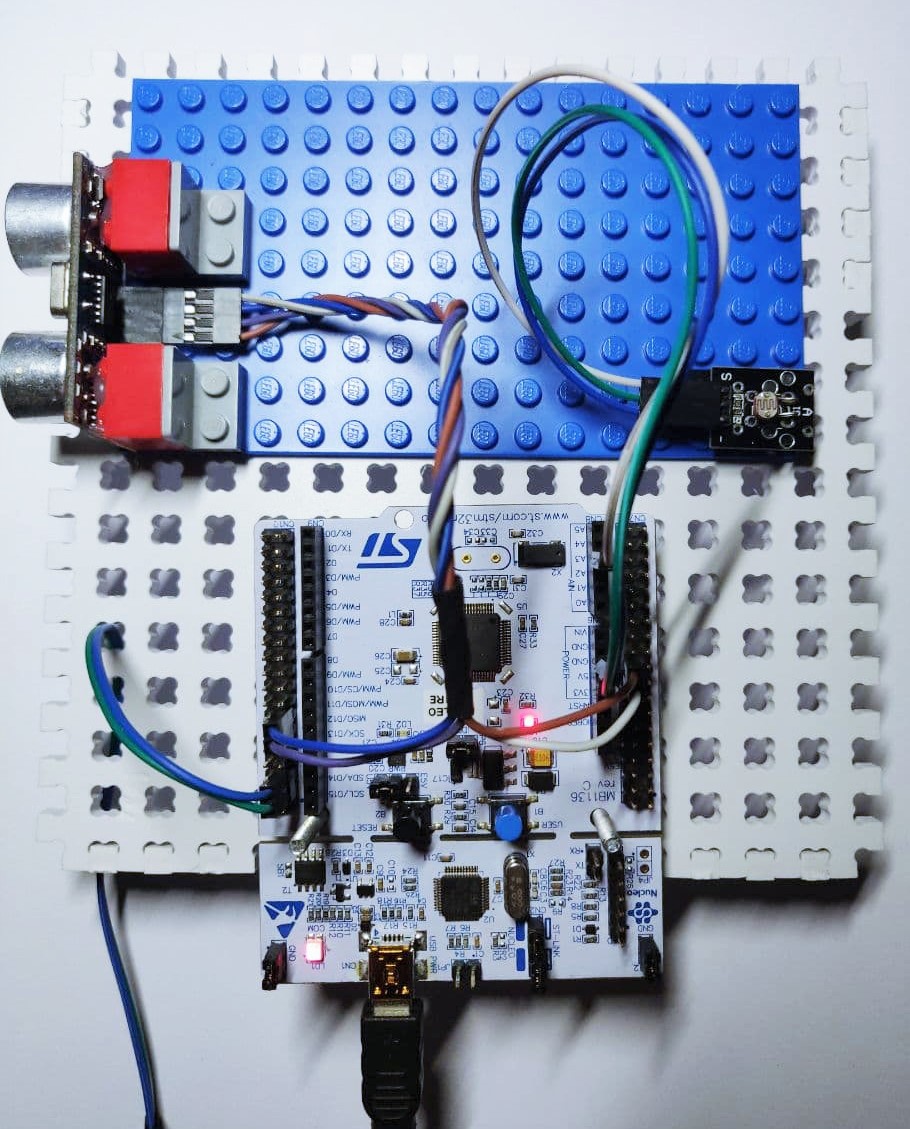
It’s a good night to move the sensor platform to a new MCU and add some sensors to demonstrate working of the emotional core (roadmap).
PR for the update (WIP): https://github.com/an-dr/zakhar_sensors/pull/4
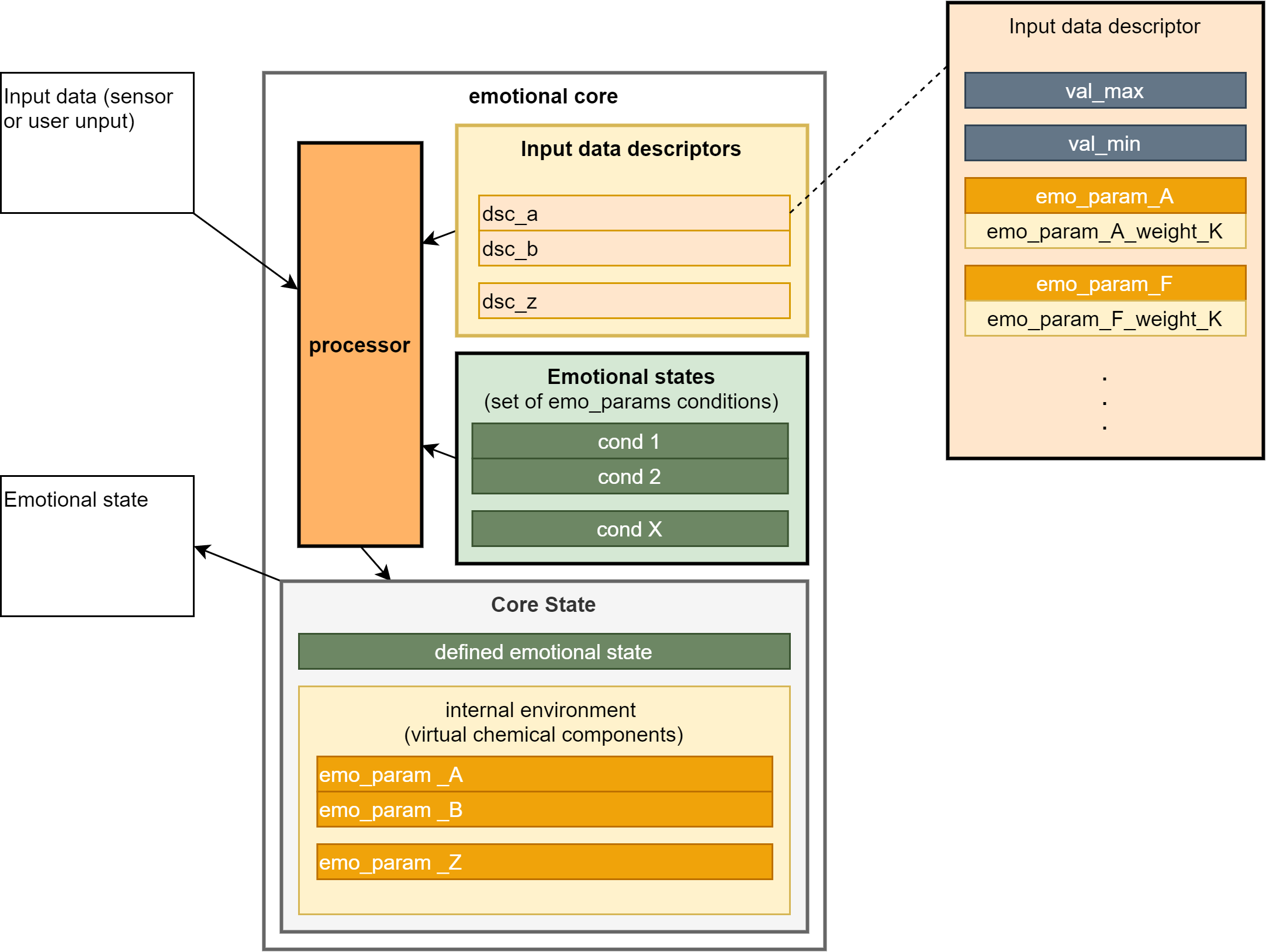
Now after some polishing of the basic emotional core I can tell about how it works and about it’s structure.
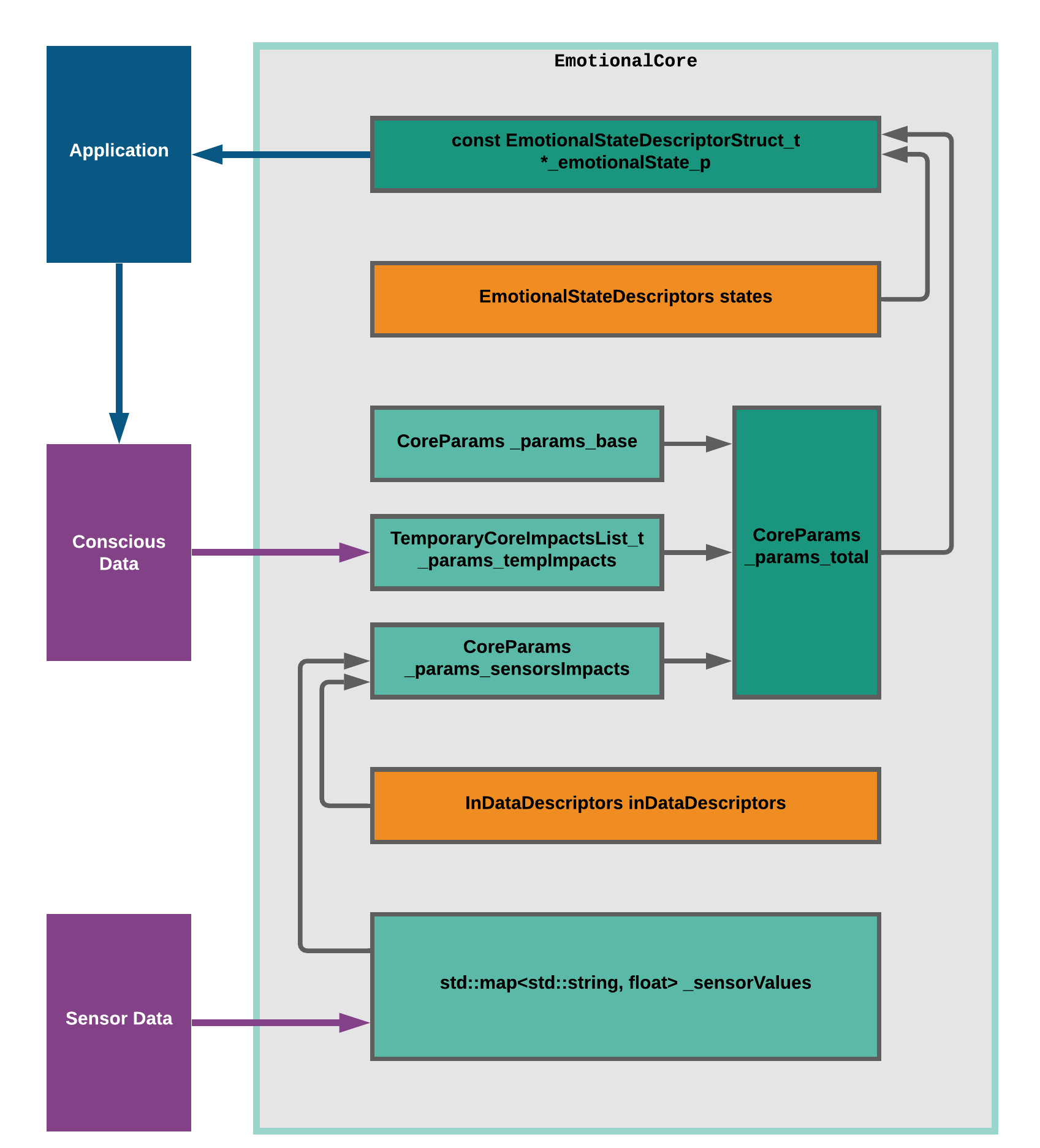
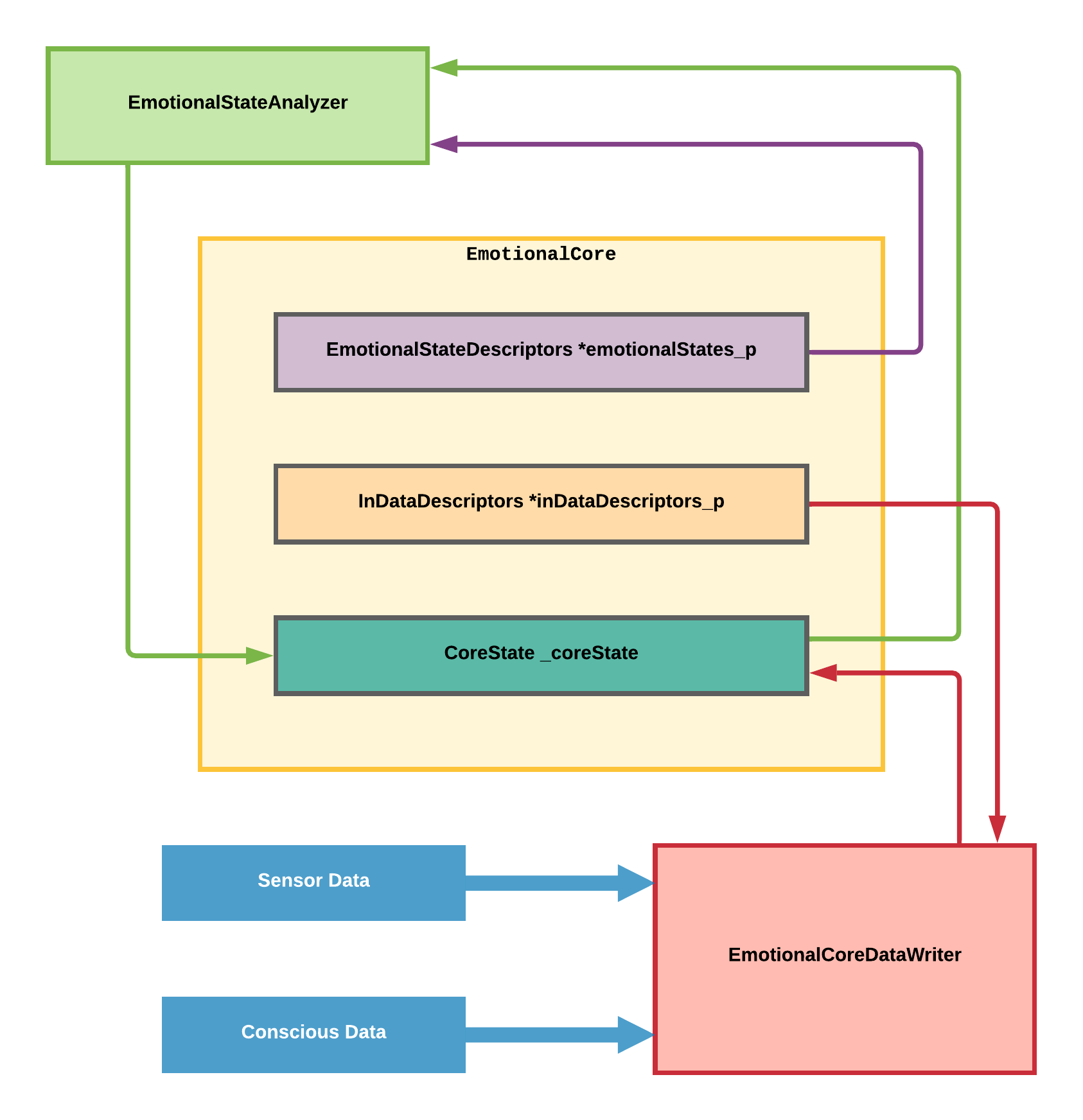
Emotional core consists of three main parts (see the picture bellow):
 Or more detailed:
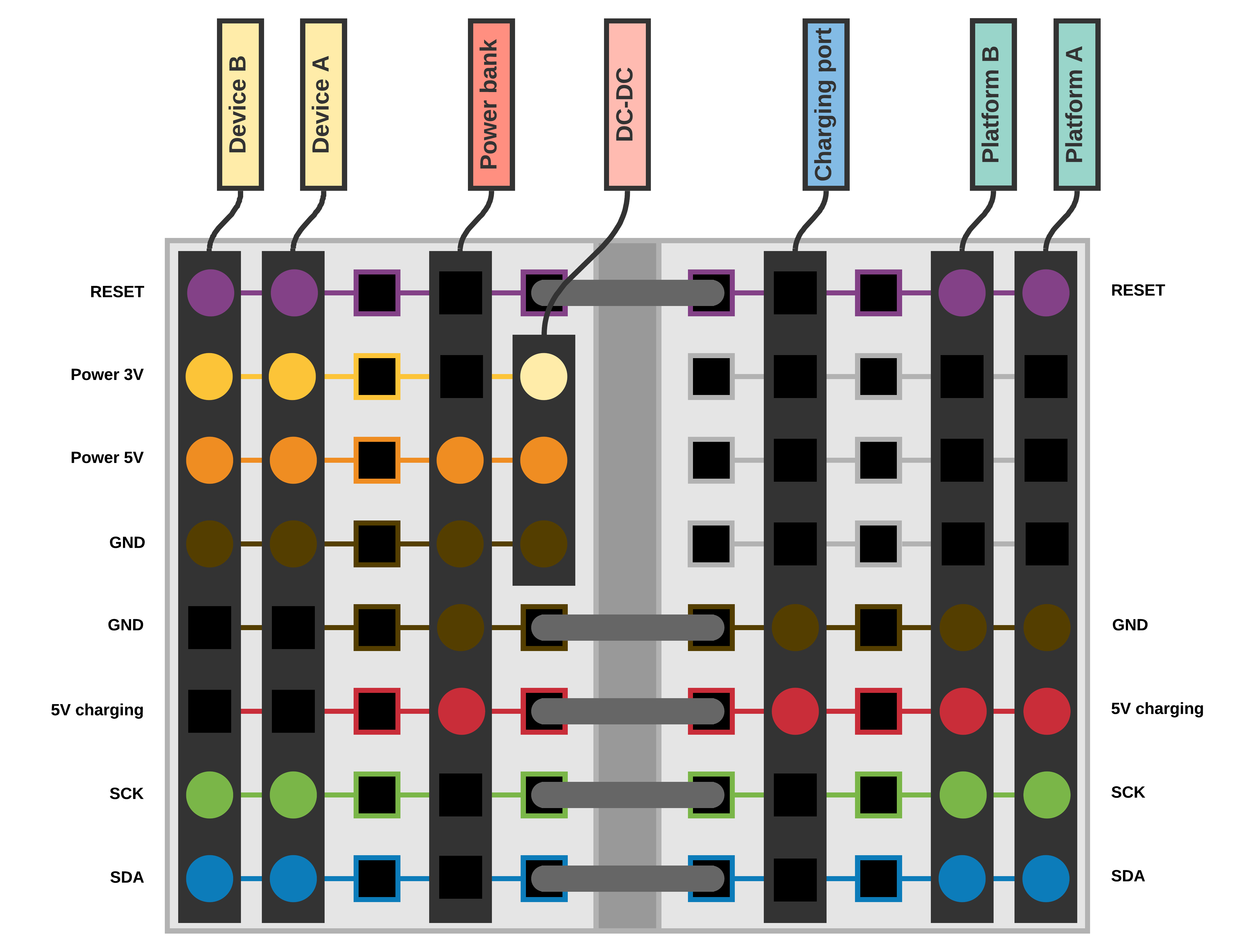
Or more detailed:
Testing the new Emotional Core for the R.Giskard project