Zakhar Brain Service

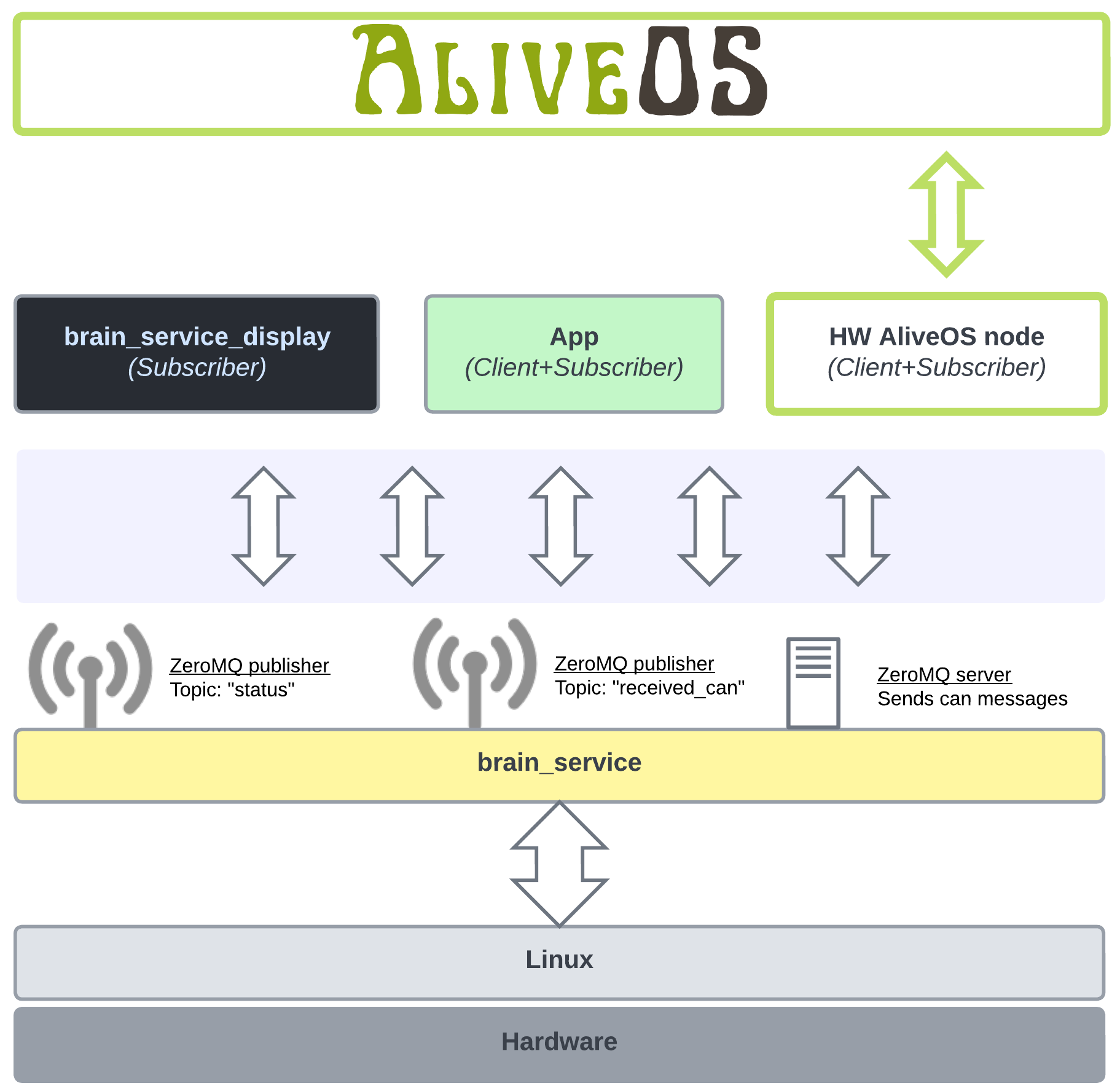
Yesterday I merged a big software update to the Zakhar’s Raspberry Pi Unit - brain_service.
The update brings a service providing the robot’s status (network, OS status) and access to the CAN bus for many simultaneously connected clients. Also, the service tracks the presence of other robot Units on the CAN bus.