I’m trying to reverse engineer myself and apply it to the Zakhar. Some points:
- I can’t send a direct order to, let say, my hand
- I must form a concept, like “fold fingers into a fist” or “move the hand up”
What that’s mean for Zakhar:
- The main program should use high-level commands or concept
- It is needed one more node translating these concepts into commands for devices
Possible in-program interaction using terms of ROS and Zakhar should be like:
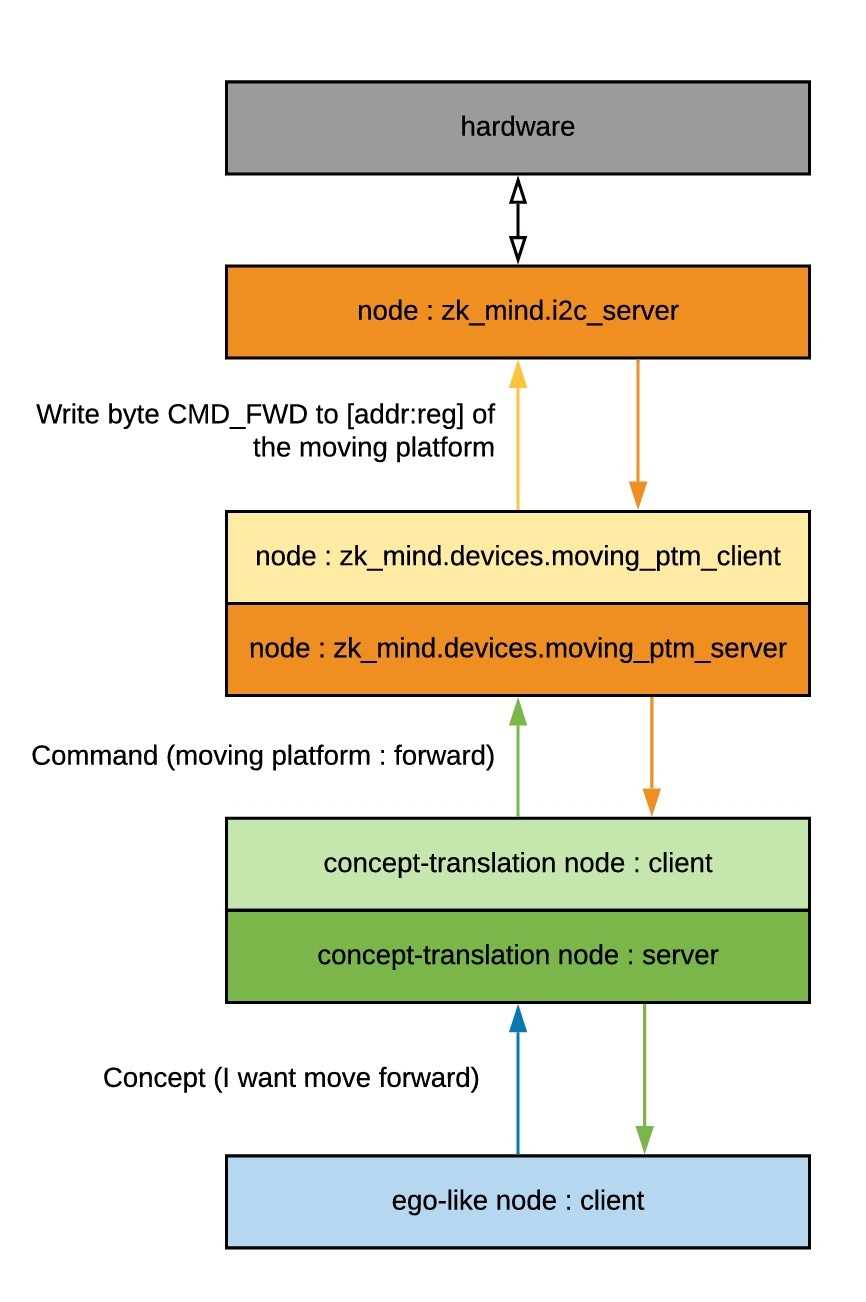 The thoughts are related to: https://github.com/an-dr/zakharos_core
The thoughts are related to: https://github.com/an-dr/zakharos_core