Emotional Core: in details
Now after some polishing of the basic emotional core I can tell about how it works and about it’s structure.
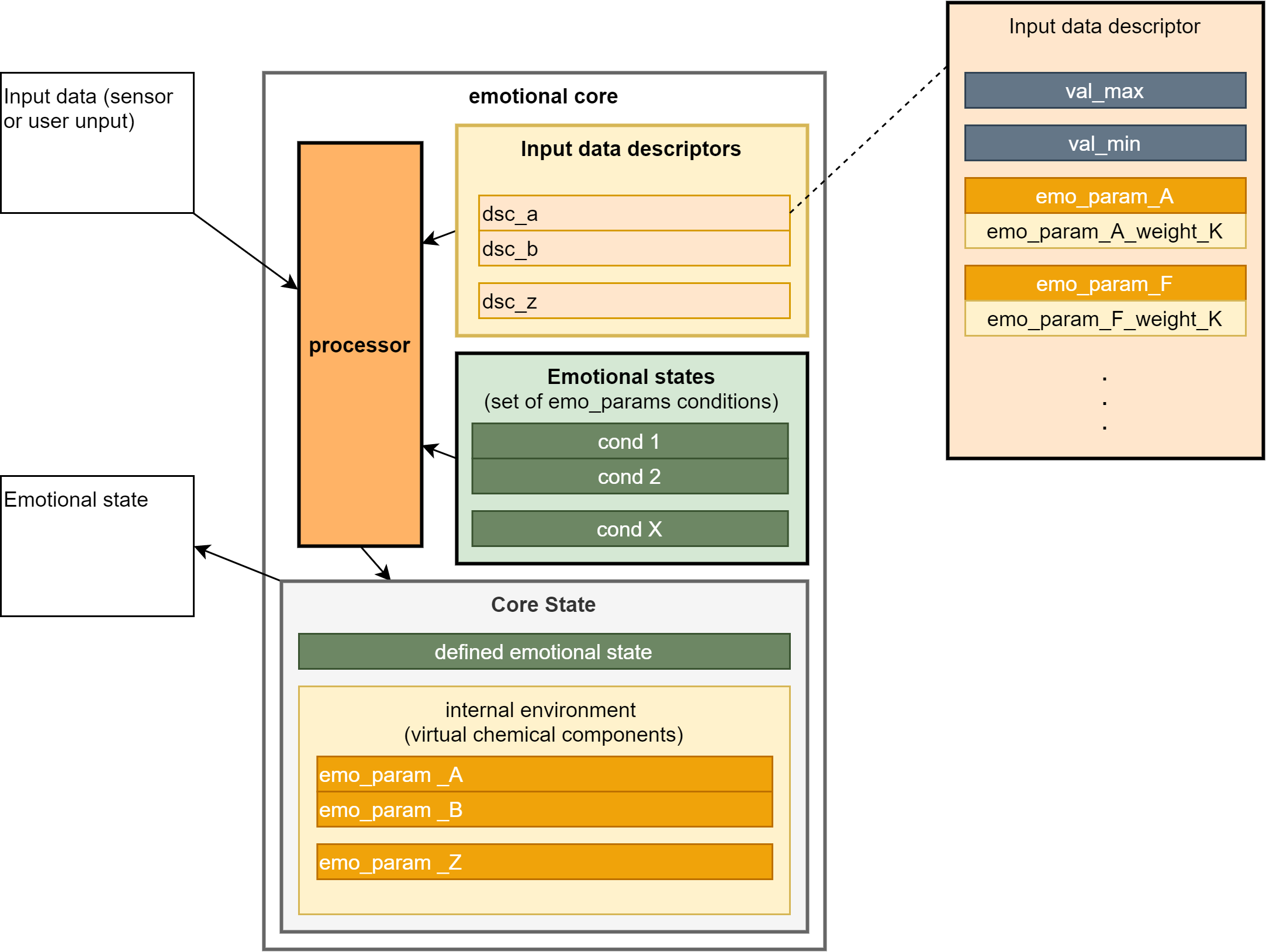
Emotional core consists of three main parts (see the picture bellow):
- Input Data Descriptors - describes data from sensors and how it should affect the core
- Emotional States Descriptors - named states of the core described by specific values of core parameters
- Core State - contains core parameters, value of sensors and pointer to relevant to parameters Emotional States Descriptors
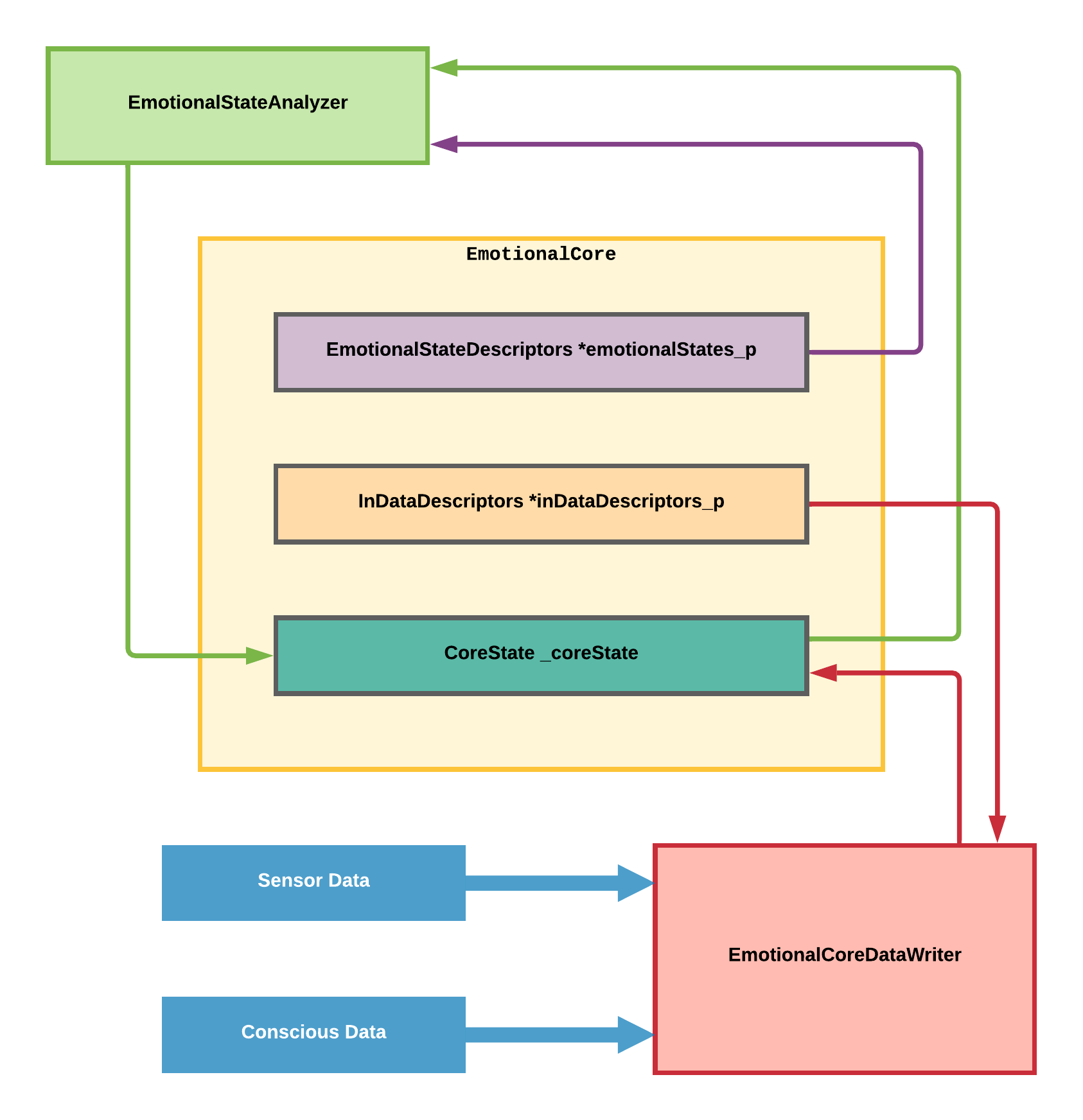
 Or more detailed:
Or more detailed: