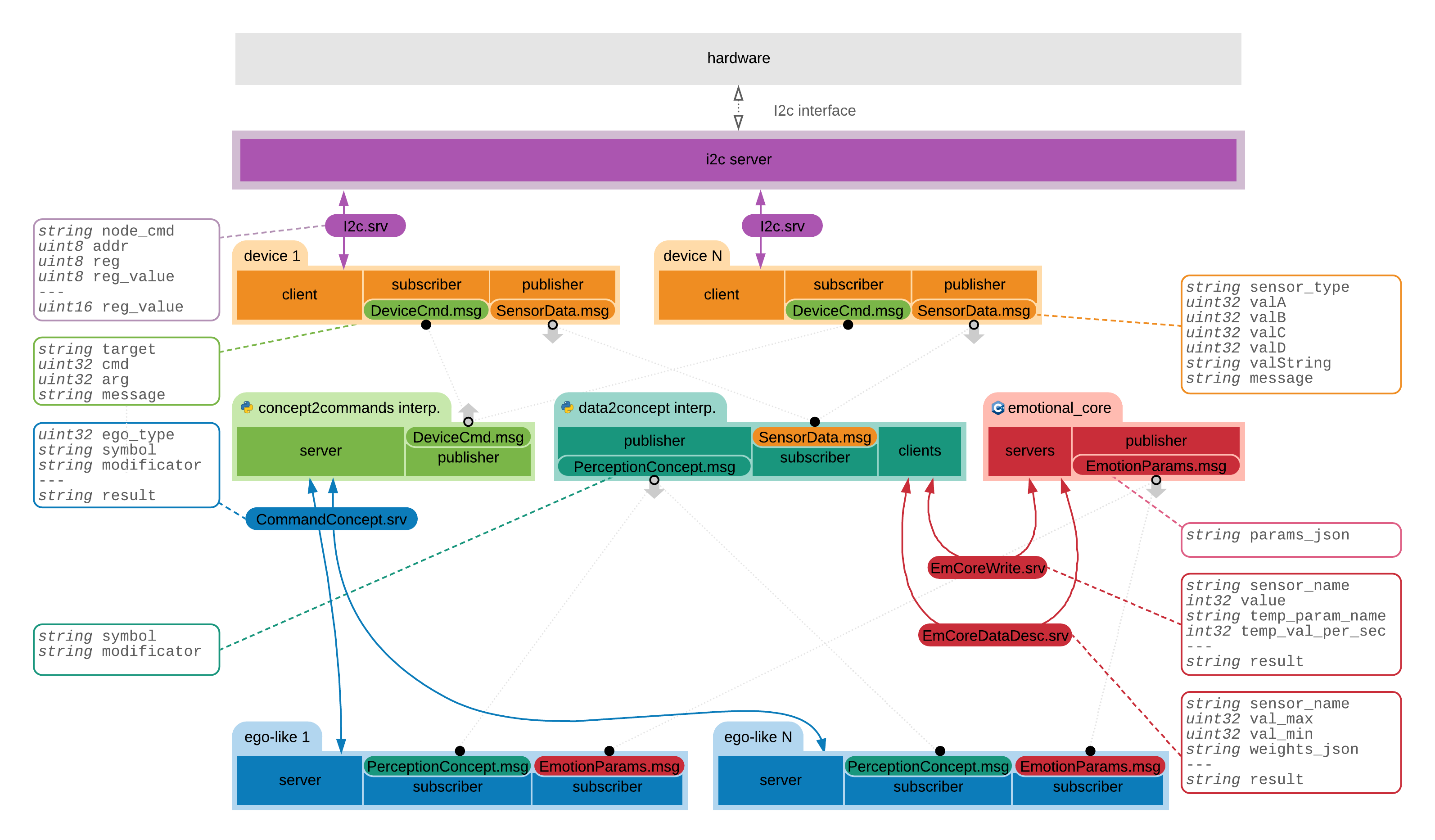
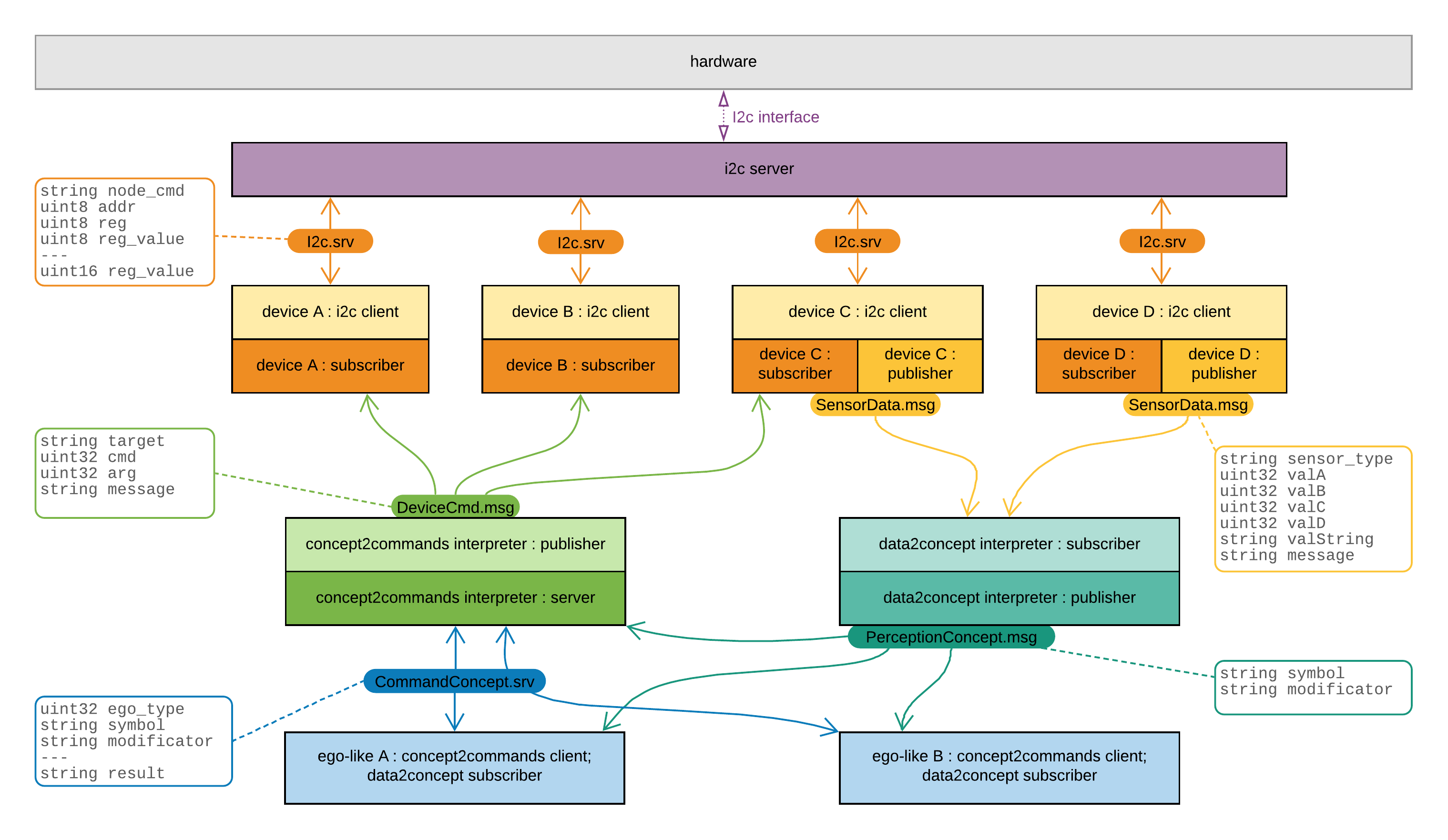
Updated draft of the ROS-node network with the Emotional Core
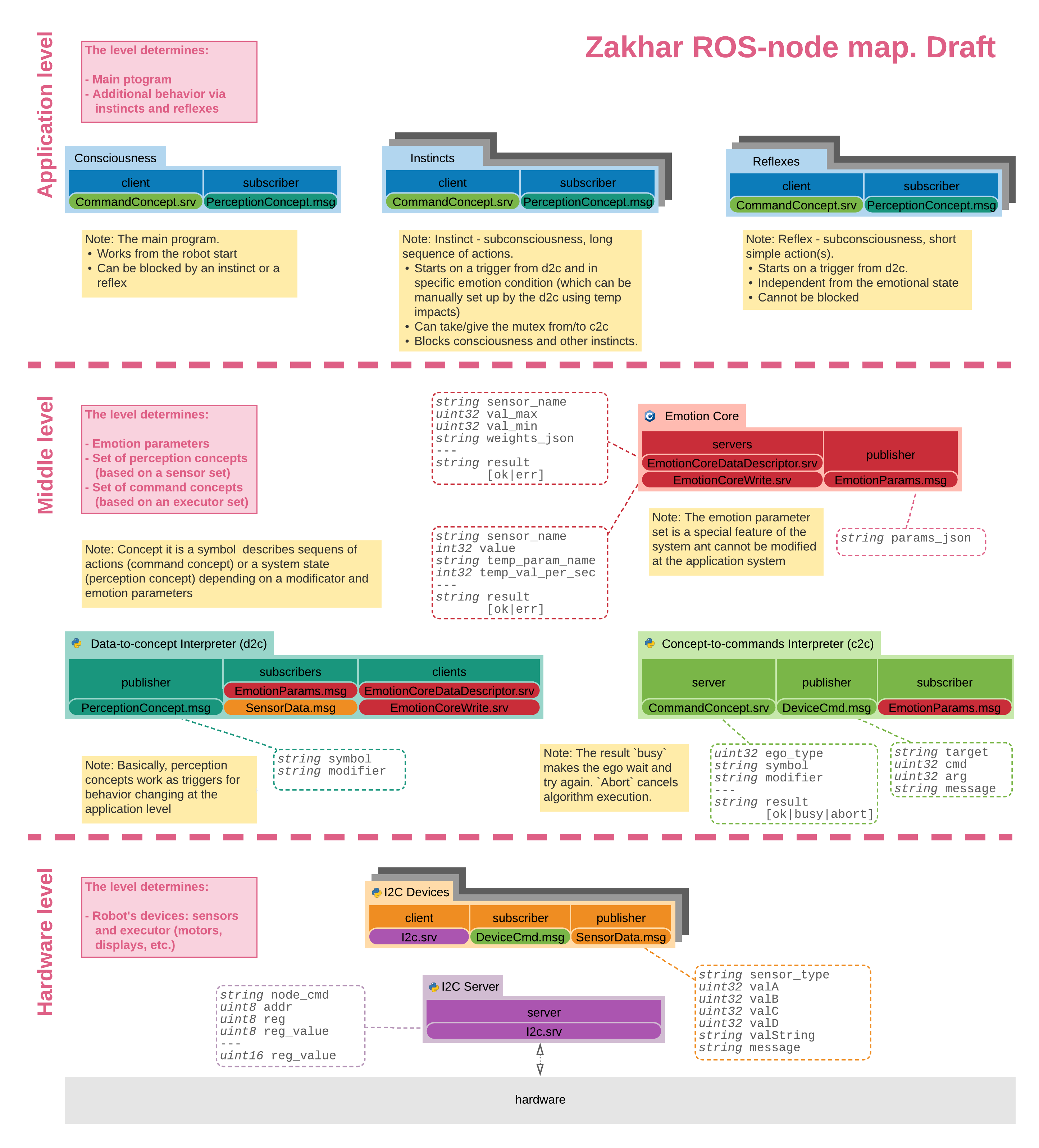
Working on the Emotion Core update it became clear to me that placing responsibility of emotional analysis to Ego-like nodes (a Consciousness, Reflexes, and Instincts) is a wrong approach. It leads to the situation where the developer of the application should specify several types of behavior themself, which is too complicated for development.
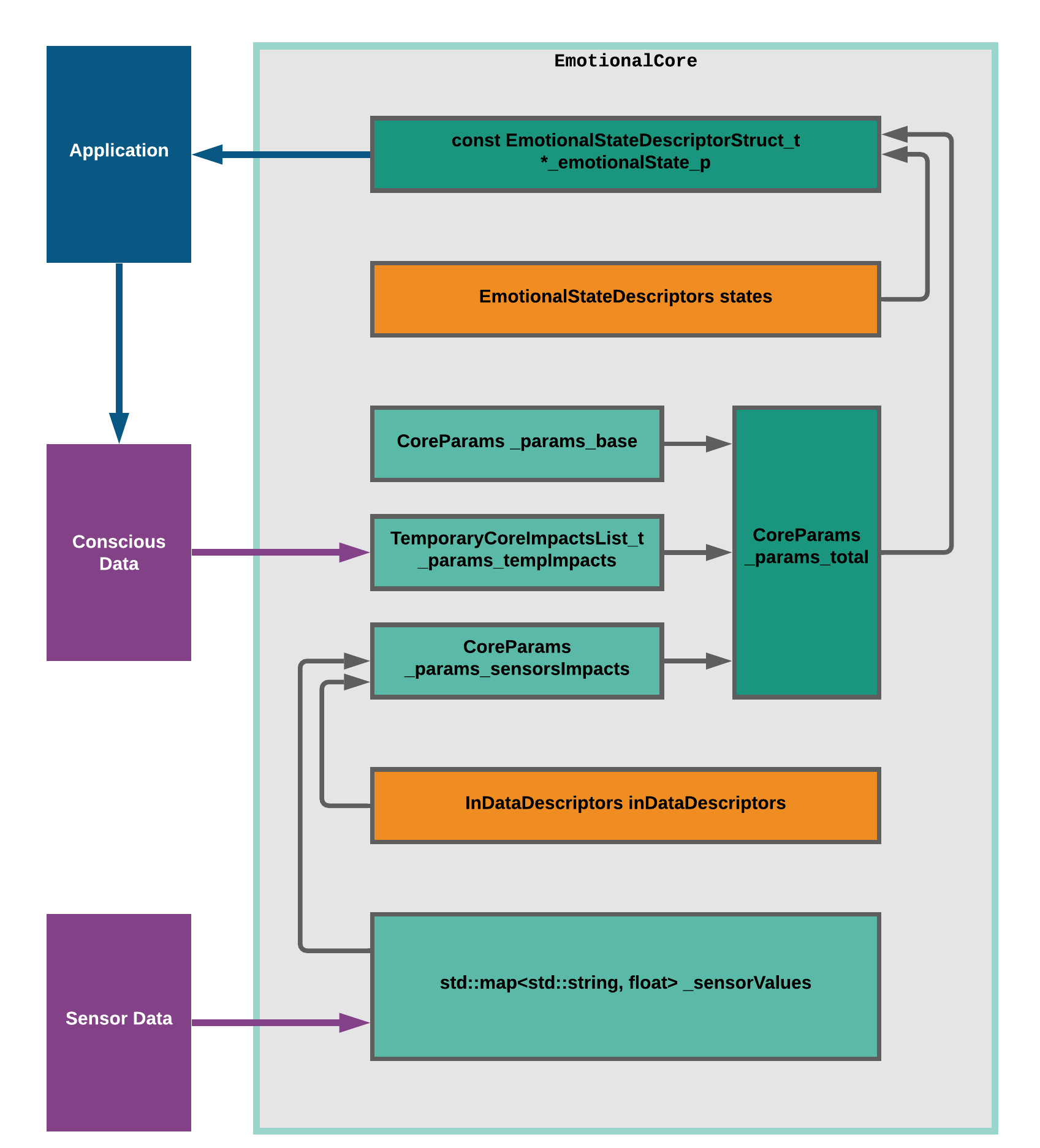
I want to implement another approach when concepts themselves contain information about how they should be modified based on a set of the emotion parameters.