Brain Software Architecture
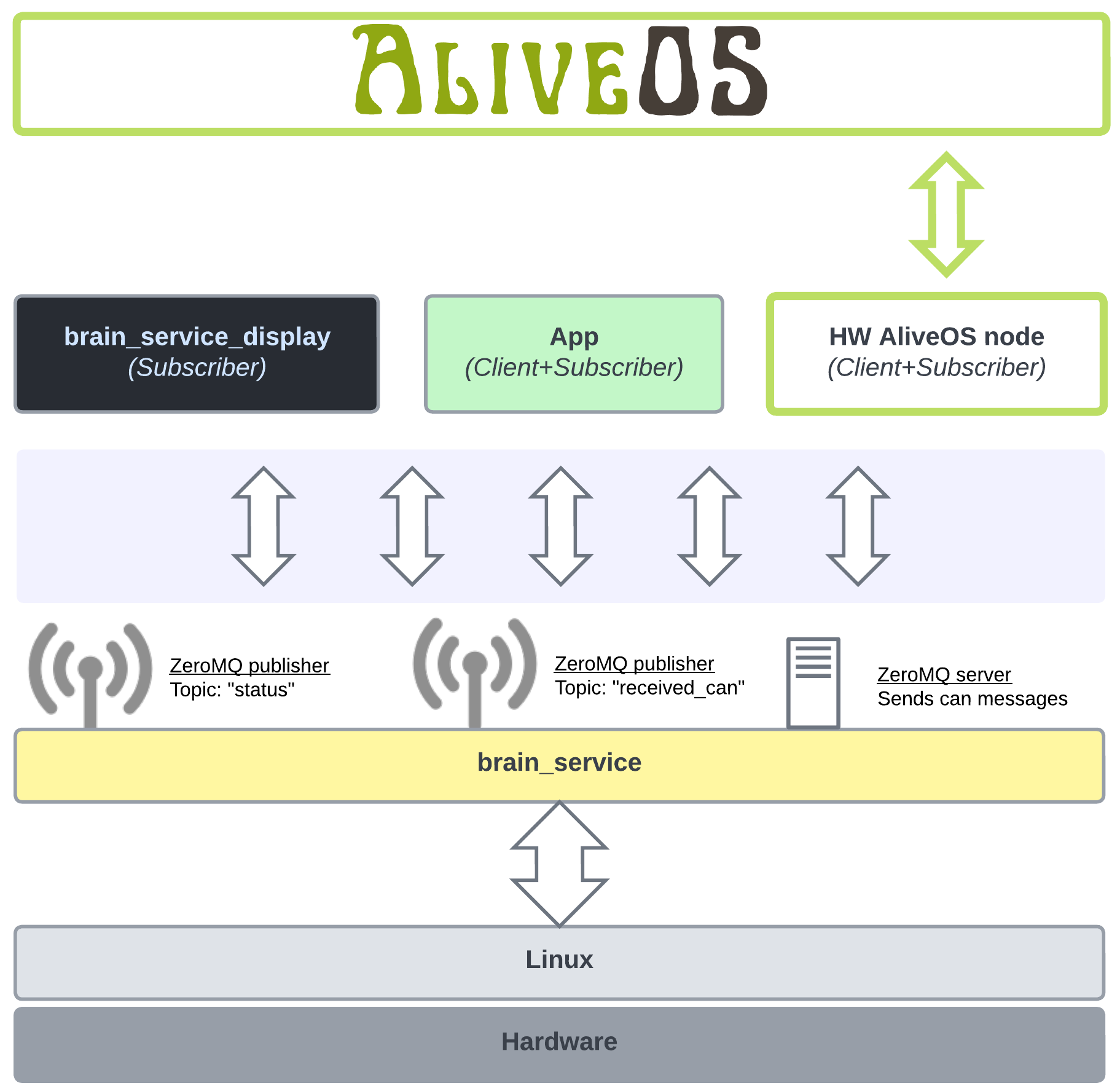
Before updating Alive OS to support qCAN (my CANbus-based protocol) I have the last thing to do. To simplify my live in future I need a CAN publisher that can publish messages to many subscribers. My main subscribe of course is AliveOS but also to display information about connected devices I need a second subscriber - a service listening only qCAN Present messages.
To do it I will use a ZeroMQ protocol - an extremely supported and documented for many programming languages standard. I’m going to update my brain_service to support the protocol and it will be responsible for all interaction with Raspberry Pi.